Prototipo 101
Contenido
- 1 Introducción y dibujo de la curva de la catenaria
- 2 Vectores velocidad [math]γ'(t)[/math] y aceleración [math]γ"(t)[/math]. Dibujo de los vectores junto a la curva
- 3 Cálculo de la longitud de la curva
- 4 Cálculo de los vectores tangente [math]\vec t (t)[/math] y normal [math]\vec n (t)[/math]. Dibujo de los vectores junto a la curva
- 5 Cálculo de la curvatura [math]κ(t)[/math]. Dibujo de su gráfica
- 6 Cálculo del radio [math]R[/math] y centro [math]Q[/math] de la circunferencia osculatriz en el punto [math]P[/math]. Dibujo de la circunferencia osculatriz junto a la curva
- 7 Información relevante sobre la catenaria
- 8 Fotos de estructuras civiles en las que se haya usado la curva
- 9 Comparación de la catenaria con una parábola. Explicación de su similitud
- 10 Representación de la superficie de revolución de la curva: Catenoide. Información e imágenes de estructuras civiles donde se encuentra dicha superficie
- 11 Descripción de como se distribuye la densidad a lo largo de la superficie. Cálculo de la masa
- 12 Póster
- 13 Bibliografía
1 Introducción y dibujo de la curva de la catenaria
A lo largo de este artículo científico se realizará un estudio matemático de la curva de la catenaria apoyado del software científico de visualización MATLAB. La catenaria da nombre a la curvatura que describe una cuerda de densidad homogénea, infinitamente flexible e inextensible que queda suspendida por sus dos extremos y es condicionada únicamente por una fuerza gravitacional uniforme. Esta curva natural tiene unas propiedades físicas interesantes por su eficiencia energética y un diseño estético. En este documento analizaremos sus características fundamentales y mostraremos cómo los ingenieros han hecho uso de esta curva en sus proyectos.
La ecuación en el plano de la curva de la catenaria es [math]y=Acosh(\dfrac{x}{A})[/math] y queda condicionada únicamente por la posición de sus extremos y la longitud de la misma. La parametrización la curva curva en coordenadas cartesianas en función de [math]t[/math] es la siguiente:
[math]γ(t)=(x(t),y(t))=(t,Acosh(\dfrac{t}{A}))[/math] ; [math]tє(-1,1)[/math] ; [math]A=3[/math]
Esta parametrización anterior define una catenaria específica que será constante en todo el artículo. Los dos extremos de nuestra curva quedan fijados en [math]t=-1[/math] y [math]t=1[/math] y el vértice o punto más bajo de la catenaria se encuentra en [math]t=0[/math]. El valor de [math]A[/math] es una constante no arbitraria que determina la forma de la catenaria.
A continuación realizamos una representación gráfica de nuestra catenaria modelo a través de MATLAB

%Fijamos el parámetro A (Vértice de la catenaria)
A=3;
%Vector temporal desde -1 hasta 1 dividido en 1000 instantes
t=linspace(-1,1,1000);
%Definimos la parametrización de la curva en coordenadas cartesianas
x=t;
y=A*cosh(t/A);
%Dibujamos
plot(x,y,'Color',[0.3 0.3 0.8])
grid on
axis equal
title('Visualización de la curva de la catenaria')
xlabel('x(t)')
ylabel('y(t)')
2 Vectores velocidad [math]γ'(t)[/math] y aceleración [math]γ"(t)[/math]. Dibujo de los vectores junto a la curva
En primer lugar calcularemos los vectores velocidad y aceleración de nuestra curva partiendo del vector posición en coordenadas cartesianas
[math]γ(t)=(x(t),y(t))=(t,Acosh(\dfrac{t}{A}))=t\vec i+Acosh(\dfrac{t}{A})\vec j[/math]
Definimos el campo de velocidades de la curva de la catenaria como el campo vectorial resultante de derivar el vector posición respecto de su parámetro [math]t[/math]
[math]γ'(t)=\vec i + senh(\dfrac{t}{A})\vec j[/math]
Definimos el campo de aceleraciones como el campo vectorial resultante de derivar por segunda vez el vector posición
[math]γ"(t)=\dfrac{t}{A}cosh(\dfrac{t}{A})\vec j[/math]
A continuación se muestra la visualización de la curva catenaria junto a los vectores velocidad y aceleración en diferentes puntos

%Nuestra catenaria modelo
A = 3;
t = linspace(-1,1,1000);
x = t;
y = A*cosh(t/A);
hold on
plot(x,y,'Color',[0.3 0.3 0.8],'linewidth',3)
%Definimos el campo vectorial de la velocidad
vx=ones(size(t));
vy=sinh(t/A);
%Definimos el campo vectorial de la aceleración
ax=zeros(size(t));
ay=(1/A)*cosh(t/A);
%Segundo vector temporal
t2=1:120:length(t);
%Dibujamos
quiver(x(t2),y(t2),vx(t2),vy(t2),'Color',[0.55 0.65 0.4],'LineWidth',1,'MaxHeadSize',2)
quiver(x(t2),y(t2),ax(t2),ay(t2),'Color',[0.95 0.5 0.05],'LineWidth',1,'MaxHeadSize',2)
legend('Catenaria','Velocidad V(t)','Aceleración A(t)')
grid on
axis equal
title('Catenaria y vectores velocidad y aceleración')
xlabel('x(t)')
ylabel('y(t)')
hold off
3 Cálculo de la longitud de la curva
La longitud de la curva es una característica muy importante en el estudio de catenarias. Suponiendo una misma ubicación de los extremos de dos cuerdas de diferentes longitudes la trayectoria que dibujarán será distinta generando dos catenarias distintas. Para el cálculo de la longitud de nuestra catenaria modelo haremos uso del vector velocidad de la siguiente forma
[math]l(γ)=\int_{a}^{b}|γ'(t)|dt=\int_{a}^{b}\sqrt{x'(t)^2+y'(t)^2}dt[/math]
Teniendo en cuenta que el [math]cosh(t)^2-senh(t)^2=1[/math] y que la función es simétrica en [math]x=0[/math] el cálculo analítico de la longitud de la curva es el siguiente
[math]l(γ)=\int_{-1}^{1}|\vec i + senh(\dfrac{t}{A})\vec j|dt=\int_{-1}^{1}\sqrt{1^2+(senh(\dfrac{t}{A})^2}dt=\int_{-1}^{1}\sqrt{cosh(\dfrac{t}{A})^2}dt=\int_{-1}^{1}cosh(\dfrac{t}{A})dt=2\int_{0}^{1}cosh(\dfrac{t}{A})dt=2Asenh(\dfrac{t}{A})|_{0}^{1}=2Asenh(\dfrac{1}{A})=2ˑ3senh(\dfrac{1}{3})=2,037[/math]
4 Cálculo de los vectores tangente [math]\vec t (t)[/math] y normal [math]\vec n (t)[/math]. Dibujo de los vectores junto a la curva
En tercer lugar vamos a calcular los vectores tangente [math]\vec t (t)[/math] y normal [math]\vec n (t)[/math]. Definimos el vector tangente [math]\vec t (t)[/math] de la siguiente forma
[math]\vec t (t)=\dfrac{γ'(t)}{|γ'(t)|}=\dfrac{\vec i + senh(\dfrac{t}{A})\vec j}{cosh(\dfrac{t}{A})}=sech(\dfrac{t}{A})\vec i+tanh(\dfrac{t}{A})\vec j[/math]
Y definimos el vector normal [math]\vec n (t)[/math] como el campo vectorial siguiente
[math]\vec n (t)=\dfrac{(-y'(t)\vec i +x'(t)\vec j)}{|γ'(t)|}=\dfrac{(-senh(\dfrac{t}{A})\vec i+\vec j}{cosh(\dfrac{t}{A})}=-tanh(\dfrac{t}{A})\vec i+sech(\dfrac{t}{A})\vec j[/math]
A continuación mostraremos de nuevo la visualización de la curva catenaria pero esta vez junto a los vectores tangente y normal en diferentes puntos

%Nuestra catenaria modelo
A = 3;
t = linspace(-1,1,1000);
x = t;
y = A*cosh(t/A);
hold on
plot(x,y,'Color',[0.3 0.3 0.8],'linewidth',3)
%Cálculos
t2 = linspace(-1,1,14);
x1 = t2;
y1 = A*cosh(t2/A);
dx = 1;
dy = sinh(t2/A);
norm_rp = cosh(t2/A);
%Campo vectorial del vector tangente
Tx = dx ./ norm_rp;
Ty = dy ./ norm_rp;
%Campo vectorial del vector normal
Nx = -dy ./ norm_rp;
Ny = dx ./ norm_rp;
% Representación de los vectores
escala = 0.5;
quiver(x1,y1, escala*Tx, escala*Ty, 'Color',[0.9 0.35 0.25],'LineWidth',1,'MaxHeadSize',2);
quiver(x1,y1, escala*Nx, escala*Ny, 'Color',[0.25 0.75 0.75],'LineWidth',1,'MaxHeadSize',2);
legend('Catenaria','Tangente T(t)','Normal N(t)')
grid on
axis equal
title('Catenaria y vectores tangente y normal')
xlabel('x(t)')
ylabel('y(t)')
hold off
5 Cálculo de la curvatura [math]κ(t)[/math]. Dibujo de su gráfica
Como su nombre nos indica la curvatura [math]κ(t)[/math] indica cuánto desvío tiene la curva en cada uno de sus puntos. La función de curvatura y su parametrización en coordenadas cartesianas es la siguiente
[math]κ(t)=\dfrac{x'(t)y"(t)-x"(t)y'(t)}{\sqrt{(x'(t)^2+y'(t)^2)^3}}=\dfrac{1}{Acosh^2(\dfrac{t}{A})}=\dfrac{1}{3cosh^2(\dfrac{t}{3})}[/math]
Debajo se ejemplifica mediante un gráfico el valor de curvatura para cada instante de [math]t[/math]

%Definimos nuestra catenaria
A=3;
t=linspace(-1,1,1000);
x=t;
y=A*cosh(t/A);
%Parametrización de la curvatura κ(t)
kappa = (1/A)*(sech(t/A)).^2;
% Dibujo de la curvatura κ(t)
figure
plot(t,kappa,'Color',[0.8 0.3 0.3],'LineWidth',1.7)
grid on
title('Curvatura de la catenaria')
xlabel('t')
ylabel('\kappa(t)')
6 Cálculo del radio [math]R[/math] y centro [math]Q[/math] de la circunferencia osculatriz en el punto [math]P[/math]. Dibujo de la circunferencia osculatriz junto a la curva
Las herramientas anteriores nos permiten calcular con precisión la parametrización de la circunferencia osculatriz de la curva de la catenaria que queda determinada por
Su radio [math]R(t)=\dfrac{1}{|κ(t)|}[/math] y su centro [math]Q(t)=γ(t)+\dfrac{1}{κ(t)}\vec n[/math]
Los siguientes cálculos se van a particularizar para el punto [math]P=γ(-0,5)[/math] que corresponde a [math]t=-0,5[/math]
La longitud del radio [math]R(t)=Acosh^2(\dfrac{t}{A})=3cosh^2(\dfrac{-0,5}{3})=3,085[/math]
Las coordenadas del centro [math]Q(t)=(t,Acosh(\dfrac{t}{A}))+Acosh^2(\dfrac{t}{A})(-tanh(\dfrac{t}{A}),sech(\dfrac{t}{A}))=(-0,5,3cosh(\dfrac{-0,5}{3}))+3cosh^2(\dfrac{-0,5}{3})(-tanh(\dfrac{-0,5}{3}),sech(\dfrac{-0,5}{3}))=(-0,5, 3,041)+3,084(0,165, 0,986)=(0,009, 6,082)[/math]
Definimos la parametrización de la circunferencia como
[math]c(t)=(Q_x+Rcos(t), Q_y+Rsen(t)) ; tє(0, 2π)[/math]
Recogiendo los valores anteriormente calculados y sustituyendo en la parametrización general anterior nos queda la siguiente circunferencia osculatriz
[math]c(t)=(0,00886+3,084cos(t), 6,082+3,084sen(t)) ; tє(0, 2π)[/math]
A continuación mostramos la visualización de nuestra catenaria modelo, el punto [math]P[/math] y su vector normal [math]\vec n[/math] junto a la circunferencia osculatriz en dicho punto y su centro

%Definimos nuestra catenaria
A=3;
t=linspace(-1,1,1000);
x=t;
y=A*cosh(t/A);
%Particularización del punto P
t0 = -0.5;
x0 = t0;
y0 = A * cosh(t0 / A);
% Derivadas de las componentes de la velocidad y la aceleración
vx = 1;
vy = sinh(t0 / A);
ax = 0;
ay = (1/A) * cosh(t0 / A);
% Parametrización de la velocidad y la tangente
velocidad = cosh(t0 / A);
Tx = 1 / velocidad;
Ty = sinh(t0 / A) / velocidad;
% Parametrización de la vector normal principal
Nx = -Ty;
Ny = Tx;
% Parametrización de la curvatura y la radio
kappa = (1/A) * sech(t0/A)^2;
R = 1 / kappa;
% Parametrización del centro de curvatura
Cx = x0 + R * Nx;
Cy = y0 + R * Ny;
% Parametrización de la circunferencia osculatriz
theta = linspace(0, 2*pi, 500);
xo = Cx + R * cos(theta);
yo = Cy + R * sin(theta);
%Dibujo
figure
plot(x, y,'Color',[0.3 0.3 0.8],'LineWidth', 3)
hold on
plot(xo, yo,'Color',[0.8 0.3 0.3], 'LineWidth',1)
plot(x0, y0, 'ko', 'MarkerSize', 8, 'MarkerFaceColor','w')
plot(Cx, Cy,'ro', 'MarkerSize', 4, 'MarkerFaceColor','r')
quiver(x0, y0, Nx, Ny, R/2, 'Color',[0.25 0.75 0.75],'LineWidth', 2)
grid on
axis equal
xlabel('x')
ylabel('y')
title('Circunferencia Osculatriz calculada en t = -0.5')
legend('Catenaria','Osculatriz','Punto de contacto','Centro','Vector normal')
7 Información relevante sobre la catenaria
En la introducción se definió de forma breve cómo es la curva de la catenaria. De manera precisa esta curva queda condicionada por las coordenadas de sus extremos, por su longitud y por un campo gravitatorio uniforme cualquiera. Parece evidente que dos cuerdas de diferente longitud cuyos extremos se han fijado en las mismas coordenadas describen diferentes curvas. También es fácil imaginar que dos cadenas iguales, con un extremo fijado en el mismo punto y el otro en puntos distintos, describen curvas diferentes. Lo que no parece evidente y es una propiedad física interesante es que dos hilos iguales en longitud y fijadas de los extremos en las mismas coordenadas pero con densidades homogéneas distintas o condicionadas por campos gravitatorios de distinta magnitud dibujan la misma curva catenaria.
Si trasladamos la curva de la catenaria al terreno de la ingeniería civil, una aplicación interesante es la transformación de la curva de convexa a cóncava, al igual que se hace con otras curvas parecidas, dando lugar a un tipo de arco, que es un elemento constructivo que redirecciona los esfuerzos. Esta aplicación se puede encontrar de forma muy clara y visible en puentes.
8 Fotos de estructuras civiles en las que se haya usado la curva

Puente de Gundián, Vedra, La Coruña, Galicia, España

9 Comparación de la catenaria con una parábola. Explicación de su similitud

La catenaria y la parábola tienen una gran similitud gráfica que hizo que la comunidad científica pensase que se trataba de la misma curva, y no fue hasta finales del siglo XVII, con el desarrollo del cálculo infinitesimal, que se consiguió hallar la ecuación de la catenaria. La catenaria fue descrita por primera vez por Gottfried Leibniz, Christiaan Huygens y Johann Bernoulli en 1691.
% Parámetro de la catenaria
A=3;
% Intervalo temporal
t=linspace(-1,1,1000);
% Parametrización de la catenaria
x=t;
y=A*cosh(t/A);
% Parametrización de la parábola
x2=t;
y2=A+x2.^2/A;
%Dibujo
figure
hold on
plot(x,y,'Color',[0.3 0.3 0.8],'linewidth',1)
plot(x2,y2,'Color',[0.8 0.3 0.3],'linewidth',1)
grid on
axis equal
title('Catenaria y Parábola')
xlabel('x(t)')
ylabel('y(t)')
% Leyenda con fórmulas
legend('Catenaria: y = Acosh(x/A)','Parábola: y = A + x^2/A')
hold off
10 Representación de la superficie de revolución de la curva: Catenoide. Información e imágenes de estructuras civiles donde se encuentra dicha superficie

Parametrización de la curva de la catenaria en [math]R^3[/math] tras una rotación de [math]90º[/math]
[math]γ(t)=(x(t), y(t), z(t))=(0, Acosh(\dfrac{t}{A}), t)[/math] ; [math]tє(-1,1)[/math] ; [math]A=3[/math]
Cálculo de la superficie de revolución usando coordenadas cilíndricas
[math]ρ(t)=\sqrt{x_1(t)^2+x_2(t)^2}=\sqrt{0^2+(Acosh(\dfrac{t}{A}))^2}=Acosh(\dfrac{t}{A})[/math]
[math]ρ(u)=Acosh(\dfrac{u}{A}) ; θ=v ; z=u ; uє(-1, 1) ; vє(0, 2π)[/math]
Paso a cartesianas
[math]x_1=ρ(u)cos(v)=Acosh(\dfrac{u}{A})cos(v)[/math]
[math]x_2=ρ(u)sen(v)=Acosh(\dfrac{u}{A})sen(v)[/math]
[math]x_3=u[/math]
Parametrización de la superficie de revolución de la curva de la catenaria (Catenoide)
[math]ɸ(u,v)=(Acosh(\dfrac{u}{A})cos(v), Acosh(\dfrac{u}{A})sen(v), u) ; uє(-1, 1) ; vє(0, 2π)[/math]
%Parámetro de la catenaria
A = 3;
%Rango de parámetros
u = linspace(-1, 1, 200);
v = linspace(0, 2*pi, 200); % ¡aquí estaba el problema!
%Mallado
[U, V] = meshgrid(u, v);
%Parametrización del catenoide
X = A * cosh(U / A) .* cos(V);
Y = A * cosh(U / A) .* sin(V);
Z = U;
%Dibujo
figure
surf(X, Y, Z)
shading interp
colormap turbo
axis equal
xlabel('X')
ylabel('Y')
zlabel('Z')
title('Catenoide')
Un ejemplo peculiar de catenoide es la superficie que se genera con agua y jabón al separar dos anillos de mismo tamaño. Este fenómeno se produce por la propiedad física de la tensión superficial del agua que en este caso particular adquiriría un rol parecido al de un campo gravitatorio constante
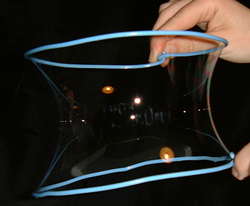
Catenoide formado por la película de agua y jabón

11 Descripción de como se distribuye la densidad a lo largo de la superficie. Cálculo de la masa
La función de densidad de la superficie está dada por [math]f(x_1, x_2, x_3)=\dfrac{x_3^2}{1+x_1^2+x_2^2}[/math]
Esta función anterior describe cómo varía la densidad en coordenadas en cartesianas. Utilizando la parametrización de la superficie del catenoide anterior nos queda ría la función de densidad en función de [math]u[/math] y [math]v[/math] de la siguiente forma
[math]r(u,v)=(x_1,x_2,x_3)=(Acosh(\dfrac{u}{A})cos(v), Acosh(\dfrac{u}{A})sen(v), u)[/math] ; [math]f(r(u,v))=\dfrac{u^2}{1+A^2cosh^2(\dfrac{u}{A})}[/math]
Como se puede observar en la ecuación, al aumentar el parámetro de [math]u[/math] la presión aumenta. Por otro lado, el parámetro [math]v[/math] no condiciona la función de densidad y nos indica que el lugar geométrico de los puntos de misma distancia al eje de rotación y misma cota tienen la misma presión.
La masa de la superficie se define de la siguiente forma
[math]\int_S f dS=\int\int_D f(\vec r(u, v))|\vec r_u(u, v)×\vec r_v(u, v)|du dv[/math]
Realizamos los siguientes cálculos
[math]r_u(u,v)=(senh(\dfrac{u}{A})cos(v), senh(\dfrac{u}{A})sen(v), 1)[/math]
[math]r_v(u,v)=(-Acosh(\dfrac{u}{A})sen(v), Acosh(\dfrac{u}{A})cos(v), 0)[/math]
[math]|\vec r_u(u, v)×\vec r_v(u, v)|=\sqrt{(-Acosh(\dfrac{u}{A})cos(v), -Acosh(\dfrac{u}{A})sen(v), Asenh(\dfrac{u}{A})cosh(\dfrac{u}{A}))^2}[/math]
[math]dS=|\vec r_u(u, v)×\vec r_v(u, v)|=Acosh^2(\dfrac{u}{A})[/math]
Cálculo de la masa
[math]M=\int\int_S f dS=\int_{0}^{2π}\int_{-1}^{1}\dfrac{u^2}{1+A^2cosh^2(\dfrac{u}{A})}A^2cosh^2(\dfrac{u}{A}) dvdu=2πA\int_{-1}^{1}\dfrac{u^2}{1+A^2cosh^2(\dfrac{u}{A})}=2π3\int_{-1}^{1}\dfrac{u^2}{1+3^2cosh^2(\dfrac{u}{3})}=6π\int_{-1}^{1}\dfrac{u^2}{1+3^2cosh^2(\dfrac{u}{3})}[/math]
Como la superficie de revolución es simétrica en sus ejes haremos uso del Teorema de Fubini para facilitar los cálculos de la integral
[math]M=6π\int_{-1}^{1}\dfrac{u^2}{1+3^2cosh^2(\dfrac{u}{3})}=12π\int_{0}^{1}\dfrac{u^2}{1+3^2cosh^2(\dfrac{u}{3})}[/math]
El cálculo de la integral resultante de forma analítica se aleja de nuestro conocimiento. Para obtener un resultado final aplicamos el método de integración del rectángulo y nos apoyamos de MATLAB para su cálculo. Tomando 10.000 tramos el resultado final es el siguiente
[math]M=1,265[/math]
% Parámetro de la superficie
A=3;
% Número de rectángulos para la aproximación
N=10000;
u_min=0;
u_max=1;
du = (u_max - u_min) / N;
% Puntos donde se evalúa
u = linspace(u_min + du, u_max, N);
% Definición de la función
h = (u.^2 .* cosh(u./A).^2) ./ (1 + A^2 * cosh(u./A).^2);
% Integral aproximada usando método del rectángulo
I_aprox = sum(h) * du;
% Cálculo de la masa
M = 4 * pi * A * I_aprox;
% Mostrar resultado
disp(['Masa aproximada: ', num2str(M)]);