Modelo Depredador-Presa de Lotka-Volterra (grupo 16)
De MateWiki
Revisión del 12:35 28 feb 2013 de Ana Calero Aparicio (Discusión | contribuciones)
1 Resolución mediante el método Runge-Kutta
A continuación se muestra el programa usado para la resolución numérica de nuestro problema mediante el método de Runge-Kutta de 4º orden para 1000 intervalos.
%Valores iniciales
t0=0; tN=100; %Extremos del intervalo a estudiar
y0=[3,1]'; %Valores de población iniciales
N=1000; h=(tN-t0)/N;%Nº y amplitud de subintervalos
y=y0;
R(1)=y(1);%Valor inicial de R (población de conejos)
F(1)=y(2);% Valor inicial de F (población de zorros)
a=0.4; b=0.37; c=0.3; d=0.05; %Parámetros
%Algoritmo
for n=1:N
k1=[a*y(1)-c*y(1)*y(2);-b*y(2)+d*y(2)*y(1)];
k2=[a*(y(1)+1/2*h*k1(1))-c*(y(1)+1/2*h*k1(1))*(y(2)+1/2*h*k1(2));-b*(y(2)+1/2*h*k1(2))+d*(y(2)+1/2*h*k1(2))*(y(1)+1/2*h*k1(1))];
k3=[a*(y(1)+1/2*h*k2(1))-c*(y(1)+1/2*h*k2(1))*(y(2)+1/2*h*k2(2));-b*(y(2)+1/2*h*k2(2))+d*(y(2)+1/2*h*k2(2))*(y(1)+1/2*h*k2(1))];
k4=[a*(y(1)+h*k3(1))-c*(y(1)+h*k3(1))*(y(2)+h*k3(2));-b*(y(2)+h*k3(2))+d*(y(2)+h*k3(2))*(y(1)+h*k3(1))];
y=y+h/6*(k1+2*k2+2*k3+k4);
R(n+1)=y(1);
F(n+1)=y(2);
end
%Dibujo
t=t0:h:tN;
figure(1)
hold on
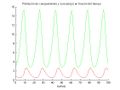
plot(t,R,'g')%Población de conejos en función del tiempo
plot(t,F,'r')%Población de zorros en función del tiempo
title('Población de conejos(verde) y zorros(rojo) en función del tiempo');
ylabel('t(años)');
hold off
figure(2)
plot(R,F,'b')%Población de zorros en función de la de conejos
title('Población de zorros en función de la de conejos');
xlabel('R(miles de conejos)');
ylabel('F(miles de zorros)');Obtenemos como resultado las siguientes gráficas:


1.1 Ventajas
En comparación con otros métodos de resolución numérica, el de Runge-Kutta tiene ciertas propiedades que pueden hacerlo preferible frente a los otros.
- Si comparamos con el método de Euler tomando diferentes amplitudes (h) de subintervalo en ambos métodosobservamos que el método de Runge-Kutta aporta soluciones más precisas.
- Esto puede deberse a que con el método de Euler la aproximación se realiza por la recta tangente y por ello, en soluciones cíclicas u oscilatorias, como es nuestro caso, no dan muy buenos resultados a no ser que h sea muy pequeña con respecto al intervalo de estudio. Esto se explica porque el método de Euler alcanza un mayor nivel de convergencia cuanto menor es el valor de h.
- Destacar al respecto que podría surgir el problema de que al escoger un valor de h demasiado pequeño el programa no responda, por lo que es necesario encontrar un valor adecuado de h que aporte una buena precisión y que pueda ser soportado.
- Sin embargo, esto no ocurre con el método de Runge-Kutta, que permite buenas aproximaciones con mayores valores de h, ya que no depende de tangentes que se desvían de la solución acumulando error que puede llegar a hacer inservible la solución final. Así lo vemos en las siguientes gráficas para las que se ha tomado un valor de h=1:
Con el método de Euler:


Con Runge-Kutta:

- *El empleo del método de los trapecios en la resolución de nuestro sistema resulta inviable, ya que se trata de un sistema no lineal.

