Análisis del comportamiento de una placa rectangular sometida a un campo de temperaturas y desplazamientos. (Grupo 26)
Contenido
1 INTRODUCCIÓN
Este trabajo esta focalizado en el estudio físico de una placa rectangular de dos dimensiones. Este estudio se realiza analizando la temperatura y las deformaciones tratandolos como campos vectoriales.
2 CONDICIONES GENERALES
El estudio como mencionamos antes se realiza sobre una placa rectangular que abarca la región [-0.5;0.5]x[0;2] . Para representarla usaremos el software científico de visualización MATLAB.
clear all
h=0.1;
u=-0.5:h:0.5;
v=0:h:4; % Definimos la región [-0,5;0;5]x[0;4]
[uu,vv]=meshgrid(u,v); % Mallado
figure(1)
xx=uu;
yy=vv;
mesh(xx,yy,0*xx) % Dibujamos el mesh
axis([-2,2,-1,5]) % Definimos la regiÛn de dibujo
view(2) % El dibujo en planta
Mallado de la placa rectangular

3 CAMPO DE TEMPERATURA
La temperatura de la placa esta distribuida mediante un campo escalar que depende de las dos variables espaciales (x,y), el campo escalar es T (x, y) = (8 − y2 + 2y)e−x2 En esta función el punto de máxima temperatura se sitúa en el punto (0,1) con una temperatura de 9 u.
3.1 DISTRIBUCIÓN DE TEMPERATURAS
Analizando el campo escalar, veremos que depende de forma exponencial de la variable "x", por lo que cuanto más nos alejemos del centro, menos temperatura habrá. En la variable “Y” la relación es parabólica, siendo una parábola cóncava hacia abajo y cuyo centro está en el punto 1, por lo que entendemos que el punto de mayor temperatura sea el (0,1).Para poder ilustrar esta distribución de temperaturas, adjuntamos el siguiente código MATLAB junto con su gráfico.
x=-0.5:0.1:0.5; % definimos el intervalo [-1/2,1/2]
y=0:0.1:4; % definimos el intervalo [0,2]
[xx,yy]=meshgrid(x,y); % matrices de x e y
figure(1)
T=(8-(yy).*(yy)+2.*(yy)).*exp(-(xx).*(xx)); % Campo escalar
surf(xx,yy,T) % Dibujar el campo
hold on % dibujamos el lÌmite inferior
plot(xx,yy,'k','linewidth',1);
axis([-2,2,-1,5]) % seleccionamos una regiÛn de dibujo
view(2) % Vemos el dibujo en planta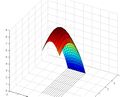
Distribución de las temperaturas

3.2 VARIACIÓN DE TEMPERATURA
La variación de la temperatura como cualquier campo escalar, se estudia analizando su gradiente. El gradiente en nuestro caso es [math]\nabla T[/math] =-2x.[math]e^(-x^2)\,[/math](8-[math]y^2 [/math]+2y)[math]\vec{i} [/math]+(-2y+2)[math]e^(-x^2)\,[/math][math]\vec{j} [/math]
Ahora representamos este campo vectorial junto a las curvas de nivel:
clear all
x=(-0.5:0.05:0.5)
y=(0:0.2:4);
[x,y] = meshgrid(x,y);
T =(8-y.^2+2.*y).*exp(-x.^2);
[px,py] = gradient(T,.05,.2);
contour(x,y,T)
hold on
quiver(x,y,px,py)
hold off
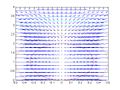
Representación del vector gradiente y las curvas de nivel

4 CAMPO DE DESPLAZAMIENTOS
Nuestra placa sufre desplazamientos debido a la acción de una fuerza determinada. Estos desplazamientos se representan mediante el vector de desplazamientos [math]\vec{U} [/math]definido como: [math]\vec{U}=y^2/2\vec{j} [/math] Este vector representa el desplazamiento de cada punto de la placa que mediante el código MATLAB que se adjunta podremos representarlo en la siguiente gráfica:
clear all
h=0.1;
x=-0.5:h:0.5; %definimos el intervalo [-1/2,1/2]
y=0:h:4; %definimos el intervalo [0,4]
[xx,yy]=meshgrid(x,y); %definimos las matrices xx y yy
Ux=0*xx; %matriz de ceros para que cuadren las dimensiones
Uy=0.1*(yy.*yy); %vector desplazamiento
quiver(xx,yy,Ux,Uy); %dibujamos el campo
view(2)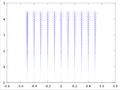
Campo de desplazamientos

En la representación del campo de vectores se observa que:el campo toma la dirección del eje de ordenadas, pues sólo tiene componente \(\vec j \).El sentido es ascendente, ya el vector desplazamiento corresponde a una función parabólica. Para visualizar el sólido antes y después de que se aplique el campo de vectores utilizamos el siguiente código Matlab:
h=0.1;
x=-0.5:h:0.5;% defino el intervalo [-1/2,1/2]
y=0:h:4;% defino el intervalo [0,4]
[xx,yy]=meshgrid(x,y);% creo la matriz de xx yy
subplot(1,2,1) % lo dibujo en la primera ventana
mesh(xx,yy,0*xx) % gráfico
axis([-1,1,-1,6])
view(2)
subplot(1,2,2) % dibujo en la segunda ventana
Ux=0*xx;
Uy=0.1*(yy.*yy);
mesh(xx+Ux,yy+Uy,0*xx)
axis([-1,1,-1,6])
view(2)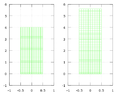
Desplazamiento respecto a la posición original

El desplazamiento se produce en los extremos en dirección vertical con sentido positivo. La parte mas baja de la placa no tiene movimiento y la parte superior de la placa tiende a ascender. La consecuencia de todo esto es una tracción en vertical de la placa.
4.1 DIVERGENCIA DE [math]\vec{U} [/math]
La divergencia en nuestro caso, se refiere a un campo vectorial expresado en coordenadas cartesianas, por lo que su expresión sería: [math] \nabla\cdot\vec U = \frac{\partial U_x}{\partial x}+ \frac{\partial U_y}{\partial y}+ \frac{\partial U_z}{\partial z} [/math] Y aplicándolo a nuestro campo vectorial la expresión de la divergencia sería así: [math] \nabla\cdot\vec U = (y^2)/5 [/math] Para representarla gráficamente utilizamos el siguiente código:
x=-0.5:0.1:0.5; % definimos el intervalo [-1/2,1/2]
y=0.5:0.1:4; % definimos el intervalo [0,2]
[X,Y]=meshgrid(x,y); %definimos las matrices X e Y
Div=2*Y/10; % divergencia del campo
surf(X,Y,Div); % dibujamos la superficie
view(2) % dibujamos el campo en 2D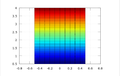
Divergencia

Podemos observar en el gráfico y comprobar analíticamente que los puntos de mayor divergencia están en torno a y=4.
4.2 ROTACIONAL DE [math]\vec{U} [/math]
El rotaciones de un campo vectorial es un operador vectorial que muestra la tendencia de un campo vectorial a inducir rotación alrededor de un punto. Como mencionamos anteriormente, nuestro campo esta expresado en coordenadas cartesianas por lo que debemos buscar la forma más concisa para su cálculo. Ayudándonos del operador nabla como un producto vectorial, podemos obtenerlo calculando su determinante, que aunque esta expresión carezca de sentido, ya que no se trata de un determinante en realidad, nos ayuda a recordar fácilmente la expresión de rotacional, que sería: [math] \nabla\times \vec U=\left| \begin{matrix} \hat x & \hat y & \hat z \\ & & \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ & & \\ U_x & U_y & U_z \end{matrix}\right| [/math] Sustituyendo debidamente las incógnitas de dicha expresión, llegamos a que el rotacional en este campo es nulo, lo que implica que las deformaciones que representa este campo no tienden a rotar en ninguno de los puntos de la placa. Por lo que: [math] \nabla\times \vec U=\left| \begin{matrix} \hat x & \hat y & \hat z \\ & & \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ & & \\ U_x & U_y & U_z \end{matrix}\right|=0 [/math]
5 TENSIONES DE LA PLACA
El conjunto de tensiones que puede sufrir un cuerpo, se pueden representar matemáticamente gracias al tensor de tensiones, pues representará el valor de las nueve tensiones posibles en cada punto del mismo. En el siguiente esquema se adjuntan las nueve tensiones diferentes y el lugar que tienen en el tensor de tensiones:
[math] [σ]_{xyz} =\begin{bmatrix} \sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix} [/math]
En nuestro caso, el tensor de tensiones de nuestra placa tendría la siguiente expresión: [math] [σ]_{xyz} =\begin{bmatrix} y/5& 0 & 0 \\ 0 & (3×y)/5 & 0 \\ 0 & 0 & y/5 \end{bmatrix} [/math]
5.1 TENSIONES NORMALES EN LA DIRECCIÓN [math]\vec{i} [/math]
Estas tensiones estarían situadas en la fila 1 y columna 1 de la matriz del tensor de tensiones, por lo que su valor es: [math]\sigma_x=y/5[/math] Esto quiere decir que en la dirección del eje x, las tensiones normales aumentarían proporcionalmente al aumentar el valor de y, es decir, que en el extremo superior de la placa obtendremos las mayores tensiones.
h=0.1;
x=-0.5:h:0.5;
y=0:h:4;
[X,Y]=meshgrid(x,y);
%TENSIONES NORMALES DEL EJE X
ty=0.2*Y
tx=0*Y;
% dibujamos %
quiver(X,Y,tx,ty)
ylabel('tensiones normales eje x')
axis([-1,1,-0.5,5])
axis equal
view(2)- Captura1993.jpg
Tensiones normales en la dirección del vector i
5.2 TENSIONES NORMALES EN LA DIRECCIÓN [math]\vec{j} [/math]
Estas tensiones estarían situadas en la fila 2 y columna 2 de la matriz del tensor de tensiones, por lo que su valor es: [math]\sigma_y=y×(3/5)[/math] Esto quiere decir que en la dirección del eje y, las tensiones normales aumentarían proporcionalmente al aumentar el valor de y, y también aumentán tres veces más que en el caso de las tensiones normales respecto al eje x antes estudiadas. Las tensiones normales máximas respecto al eje y también se encontrarían en el extremo superior de la placa.
h=0.1;
x=-0.5:h:0.5;
y=0:h:4;
[X,Y]=meshgrid(x,y);
%TENSIONES NORMALES DEL EJE Y
ty=0*Y;
tx=0.6*Y;
% dibujamos %
quiver(X,Y,tx,ty)
xlabel('tensiones normales eje Y')
axis([-1,1,-0.5,5])
axis equal
view(2)
Tensiones normales en la dirección del vector j

5.3 TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL A [math]\vec{i} [/math]
Estas tensiones estarían situadas en la columna 1 y en las filas 2 y 3, es decir, que serían las tensiones [math]\tau_{yx} \tau_{zx} [/math] que en nuestro caso su valor es [math]\tau_{yx}=0 \tau_{zx} =0[/math] Por lo que llegamos a la conclusión de que en nuestro caso no existen este tipo de tensiones tangenciales.
5.4 TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL A [math]\vec{j} [/math]
Estas tensiones estarían situadas en la columna 2 y en las filas 1 y 3, es decir que serían las tensiones [math]\tau_{xy} \tau_{zy} [/math] que en nuestro caso su valor es [math]\tau_{xy}=0 \tau_{zy} =0[/math] Por lo que llegamos a la conclusión de que en nuestro caso no existen tensiones tangenciales de este tipo.
6 MASA DE LA PLACA
La masa de nuestra placa vamos a calcularla mediante el siguiente código MATLAB a partir de su función densidad que tiene un valor [math]d(x,y,z)=xylog{x+2} [/math]. La masa total de nuestra placa es 0.4328
h=1/10; %Numero de puntos
a=-0.5; b=0.5; c=1; d=4; %Extremos del intervalo
u=a:h:b; v=c:h:d; %coordenadas iniciales
[uu,vv]=meshgrid(u,v); %coordenadas del rectángulo
f=vv.*uu.*log(uu+2); %función
a=h^2*f;
masa=sum(sum(a))%masa total