Diferencia entre revisiones de «Onda Longitudinal plana (Grupo 60)»
(→Divergencia del campo de desplazamiento) |
(→Divergencia del campo de desplazamiento) |
||
| Línea 159: | Línea 159: | ||
title('Divergencia del campo de desplazamiento U(x,y)'); | title('Divergencia del campo de desplazamiento U(x,y)'); | ||
%de -0,5 a 0 se expande y de 0 a 0,5 se contrae; | %de -0,5 a 0 se expande y de 0 a 0,5 se contrae; | ||
| + | }} | ||
==Rotacional del campo de desplazamiento== | ==Rotacional del campo de desplazamiento== | ||
Revisión del 19:44 1 dic 2025
| Trabajo realizado por estudiantes | |
|---|---|
| Título | Onda longitudinal plana |
| Asignatura | Teoría de Campos |
| Curso | 2025-26 |
| Autores |
|
| Este artículo ha sido escrito por estudiantes como parte de su evaluación en la asignatura | |
Contenido
- 1 Introducción
- 2 Mallado del sólido
- 3 Campo de Temperatura
- 4 Gradiente de Temperatura y Curvas de Nivel
- 5 Campo de Desplazamiento
- 6 Desplazamiento del sólido
- 7 Divergencia del campo de desplazamiento
- 8 Rotacional del campo de desplazamiento
- 9 Tensor de deformaciones
- 10 Tensiones tangenciales respecto al plano ortogonal a i
- 11 Tensiones tangenciales respecto al plano ortogonal a j
- 12 Masa de la placa
- 13 Aplicaciones en la Ingenieria
1 Introducción
Una onda longitudinal plana es un tipo de onda mecánica que se caracteriza por su modo de vibración, las partículas de un medio vibran y se desplazan en la misma dirección en la que se propaga la onda. Como resultado las partículas se agrupan más (se comprime el medio) o menos (se expande el medio) uniformemente a lo largo del medio.
En este trabajo se estudia la propagación de la onda longitudinal plana en una placa, definida en el dominio rectangular [math][0, 4]\times[- \frac{1}{2}, \frac{1}{2}][/math], cuando se le aplica una fuerza desde uno de sus extremos. Una onda plana está definida por la expresión general: [math]\vec{u}(\vec{r_0}, t) = \vec{a} \cos(\vec{b} \cdot \vec{r_0} - ct)[/math]
Donde [math]\vec{r_0}(x,y)[/math] es el vector posición de los puntos de la placa en reposo, [math]\vec{a}[/math] es la amplitud de la onda,[math]\vec{b}[/math] es el vector de propagación y [math]c[/math] es la velocidad de propagación de la onda.
Luego, ya conociendo las ecuaciones principales del movimiento, se considera el vector de posición de los puntos de la placa ya comenzado el movimiento ondulatorio: [math]\vec{r}(x,y,t)= \vec{r_0}(x,y)+\vec{u}(x,y,t)[/math]
Particularizando para los valores: [math]\vec{a} = \frac{\vec{i}}{10}, \quad \vec{b} = \pi \vec{i}, \quad t = 0[/math] , se obtiene el campo de desplazamientos de la onda longitudinal plana: [math]\vec{u}(x,y) = \frac{\cos(\pi x)}{10} \vec{i}[/math]
Además, se considera el campo de temperatura definido por: [math]T(\rho, \theta) = e^{-\theta}[/math]
Los objetivos principales de este estudio incluyen el cálculo de los operadores diferenciales fundamentales como el gradiente de temperatura ,la divergencia y el rotacional del campo de desplazamientos. Determinaremos el tensor de deformaciones y el de tensiones aplicando la teoría de elasticidad lineal.
Analizaremos las curva de nivel de temperatura y verificaremos la ortogonalidad del gradiente respecto a estas curvas. Además, identificaremos las zonas de la placa donde se concentran las mayores tensiones.
2 Mallado del sólido
La gráfica muestra el mallado cuyo dominio rectangular es [math][0, 4] \times [-\frac{1}{2}, \frac{1}{2}][/math] , se ha generado un mallado con separación h= 0,1 en ambas direcciones.
Para obtener la gráfica hemos utilizado el siguiente código en MATLAB.
%Parámetros del dominio
xmin=-0.5;
xmax=0.5;
ymin=0;
ymax=4;
h=0.1;
% Definimos los vectores x, y en la región (xmin, xmax)x(ymin, ymax) con
% paso de muestreo h
x=xmin:h:xmax;
y=ymin:h:ymax;
%La instrucción meshgrid combina cada xi con yi formando parejas de
%puntos devolviendo dos matrices X, Y con las coordenadas xi en x y con las
%coordenadas yi en y
[X,Y]=meshgrid(x,y);
%Representación
figure(1);
hold on
plot(X,Y,'b-','LineWidth',1); %mallado vertical
plot(X',Y','b-','LineWidth',1); %mallado horizontal
plot(X,Y,'k.','MarkerSize',8); %puntos
axis equal; grid on; %ejes iguales; cuandrícula activada
xlabel('x'); ylabel('y'); %nombres de los ejes
title('Mallado'); %título de la gráfica
hold off
3 Campo de Temperatura
El campo de temperatura está definido por: [math]T(\rho, \theta) = e^{-\theta}[/math]
En la formula observamos que el campo solo depende de \(\theta \), esto significa que la temperatura varía con la orientación. A medida que aumenta \(\theta \), la temperatuta disminuye exponencialmente.
%Pasamos las coordenadas cartesianas a polares
rho= sqrt(X.^2+Y.^2);
theta=atan2(Y,X);
T=exp(-theta); %Función temperatura
%Representación
figure(2);
pcolor(X, Y, T); %proyección horizontal de la superficie
shading interp; % Suaviza los colores
ylabel(colorbar, 'Temperatura');
axis equal; grid on;
title('Campo de Temperatura T(rho, theta) = e^{-\theta}');
xlabel('x'); ylabel('y');
4 Gradiente de Temperatura y Curvas de Nivel
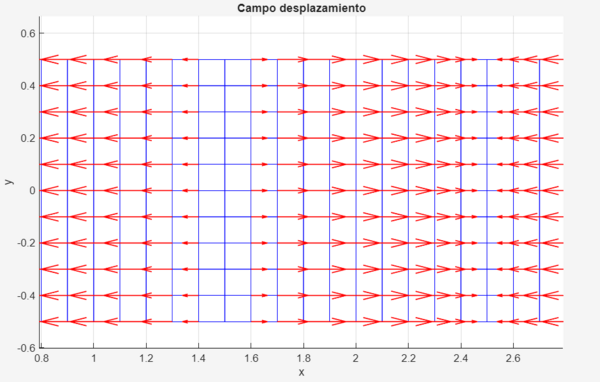
5 Campo de Desplazamiento
En este apartado, calcularemos y representaremos sobre el mallado (Representado en el Apartado 2) de los puntos de la placa en reposo el campo vectorial desplazamiento [math]\vec{u}(\vec{r_0}, t) = \vec{a} \cos(\vec{b} \cdot \vec{r_0} - ct)[/math]
En esta imagen se representa el mallado en azul y el campo vectorial desplazamiento en rojo:

Para observar más claramente el campo desplazamiento hemos duplicado su módulo y ampliado la imagen:

A continuación, se adjunta el código con el que se ha calculado y representado el campo desplazamiento y el mallado.
Ux=cos(pi.*X)/10; % componente X del desplazamiento
Uy=zeros(size(Ux)); % componente Y del desplazamiento
%Representación
figure(4)
%X, Y definen las posiciones de inicio de las flechas y Ux,Uy son las componentes los vectores del campo desplazamiento
hold on
plot(X,Y,'b-','LineWidth',0.2); %mallado vertical
plot(X',Y','b-','LineWidth',0.2); %mallado horizontal
quiver(X,Y,Ux,Uy,0,'r','LineWidth',1);
title('Campo desplazamiento');
xlabel('x'); ylabel('y');
axis equal;grid on;
hold off
6 Desplazamiento del sólido
Una vez calculado el campo desplazamiento, es interesante observado como ha afectado este movimiento a la placa. La mejor forma es observando la posición de los puntos previa al desplazamiento y la posición después del desplazamiento.
La ecuación del vector posición de un punto es la siguiente [math]\vec{r}(x,y,t)= \vec{r_0}(x,y)+\vec{u}(x,y,t)[/math], como se comentó previamente en la Introdcción.
7 Divergencia del campo de desplazamiento
%Representación del campo desplazamiento
%La instrucción quiver dibuja vectores con dirección y magnitud de un campo
%vectorial.
% X, Y definen las posiciones de inicio de las flechas y Ux,Uy son las
% componentes los vectores del campo desplazamiento
figure(6)
%Cálculo numérico del gradiente del desplazamiento
[dUx,dUy] = gradient(Ux,h,h);
%Representación del campo gradiente del desplazamiento
subplot(1,2,1)
%La instrucción quiver dibuja vectores con dirección y magnitud de un campo
%vectorial.
% X, Y definen las posiciones de inicio de las flechas y dUx,dUy son las
% componentes los vectores del campo gradiente desplazamiento
quiver(X, Y, dUx, dUy, 'r', 'LineWidth', 1);
axis equal; grid on;
xlabel('x'); ylabel('y');
title('Campo gradiente del desplazamiento U(x,y)');
%Representación de la divergencia
%Comando divergence para calcular la divergencia.
subplot(1,2,2)
div_U = divergence(X, Y, Ux, Uy);
pcolor(X, Y, div_U);
shading interp;
colorbar;
axis equal; grid on;
xlabel('x'); ylabel('y');
title('Divergencia del campo de desplazamiento U(x,y)');
%de -0,5 a 0 se expande y de 0 a 0,5 se contrae;
8 Rotacional del campo de desplazamiento
%Al ser una onda longitudinal no hay rotación ya que el desplazamiento es
%en línea recta. Solo existe la rotación si el movimento fuese como el de
%un remolino
[dUx_dx, dUx_dy] = gradient(Ux, h, h);
[dUy_dx, dUy_dy] = gradient(Uy, h, h);
rot_u = dUy_dx - dUx_dy; % fórmula del rotacional en 2D
figure(7);
contourf(X, Y, rot_u, 20);
colorbar;
title('Rotacional
9 Tensor de deformaciones
% 9. Tareas (8) : Tensor de Tensiones Normales
%Si calculamos sigma=lambda(grad u ) I + 2 mu epsilon con lambda y mu
%igual a 1
%como grad u es -pi sen(pix) / 10 y epsilon es un medio de la suma de
%esa matriz y su traspuesta, da la misma matriz epsilon=grad u sustituyo en
%sigma
%la componente 11 de la matriz es la tension normal en i
%la componente 22 de la matriz es la tension normal en j
% Las componentes de la tensión solo dependen de X
Sigma_11 = -(3*pi/10) * sin(pi * X); % Tensión normal en dir i
Sigma_22 = -(pi/10) * sin(pi * X); % Tensión normal en dir j (igual a la de k)
figure(8);
subplot(1, 2, 1);
pcolor(X, Y, Sigma_11);
shading interp; colorbar;
axis equal; grid on
title('Tensión Normal en i');
subplot(1, 2, 2);
pcolor(X, Y, Sigma_22);
shading interp; colorbar;
axis equal; grid on
title('Tensión Normal en j');
10 Tensiones tangenciales respecto al plano ortogonal a i
%tanto en tension tangencial para i como para j es cero ya que sigma por i
% %es sigma11 por i, y (i por sigma por i) por i es sigma 11 por i,,, si
% los restas da cero
Sigma_12 = zeros(size(X));
Tau_i = abs(Sigma_12);
figure(9);
subplot(1,2,1)
pcolor(X, Y, Tau_i);
shading interp; colorbar;
axis equal; grid on
title('Tensión Tangencial respecto a i τi');
11 Tensiones tangenciales respecto al plano ortogonal a j
Tau_j = abs(Sigma_12);
subplot(1,2,2);
pcolor(X, Y, Tau_j);
shading interp; colorbar;
axis equal; grid on
title('Tensión Tangencial respecto a j τj');
12 Masa de la placa
%RECORDAR h=0.1 x=xmin:h:xmax y=ymin:h:ymax [X,Y]=meshgrid(x,y)
%Ux=cos(pi.*X)/10 Uy=zeros(size(Ux));
%Definir la densidad d(x,y), función anónima
d = @(x,y) 1 + exp(x.*sqrt(x.^2 + y.^2));
%Calculamos la masa total con integral2
M=integral2(d, -0.5, 0.5, 0, 4);
%Mostramos el resultado
fprintf('La masa total de la placa es aproximadamente: %.6f\n', M);