Diferencia entre revisiones de «VISUALIZACION CAMPOS ESCALARES GRUPO 5.C»
(Página creada con « <big><big>'''VISUALIZACIÓN DE CAMPOS VECTORIALES Y ESCALARES EN ELASTICIDAD'''</big></big> En la realidad es natural trabajar con magnitudes escalares y vectoriales en...») |
|||
| Línea 27: | Línea 27: | ||
estableciendo los limites de los ejes de representación en (x, y) ∈ [−1, 4] × [-1, 4]. | estableciendo los limites de los ejes de representación en (x, y) ∈ [−1, 4] × [-1, 4]. | ||
<gallery> | <gallery> | ||
| − | + | Z01.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z02.jpg|MALLADO DE CUARTO DE ANILLO | |
</gallery> | </gallery> | ||
| Línea 40: | Línea 40: | ||
<gallery> | <gallery> | ||
| − | + | Z03.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z04.jpg|DISTRIBUCIÓN DE LA TEMPERATURA | |
| − | + | Z05.jpg|CURVAS DE NIVEL DEL ANILLO | |
</gallery> | </gallery> | ||
Observamos en la primera imagen la distribución de temperatura ,mientras que en la gráfica de la izquierda las curvas de nivel del solido. | Observamos en la primera imagen la distribución de temperatura ,mientras que en la gráfica de la izquierda las curvas de nivel del solido. | ||
| Línea 55: | Línea 55: | ||
donde la derivada dirección es máxima. | donde la derivada dirección es máxima. | ||
<gallery> | <gallery> | ||
| − | + | Z006.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z07.jpg|GRADIENTE DE LA TEMPERATURA | |
| − | + | Z08.jpg|GRADIENTE APLICADO EN LAS CURVAS DE NIVEL | |
</gallery> | </gallery> | ||
Gráficamente podemos observar que los vectores del gradiente son perpendiculares a la superficie del sólido | Gráficamente podemos observar que los vectores del gradiente son perpendiculares a la superficie del sólido | ||
| Línea 65: | Línea 65: | ||
Cada vector del campo de desplazamiento representa la fuerza aplicada en cada punto del solido y nos indica a dirección de desplazamiento que lleva cada uno. | Cada vector del campo de desplazamiento representa la fuerza aplicada en cada punto del solido y nos indica a dirección de desplazamiento que lleva cada uno. | ||
Consideramos el campo de desplazamiento u ⃗con condiciones establecidas como que los puntos situados en ρ = 1 no sufren desplazamiento y que ∇·u= θ(2 − 1/ρ)/5. Para calcular el campo de desplazamiento lo resolveremos primero analíticamente | Consideramos el campo de desplazamiento u ⃗con condiciones establecidas como que los puntos situados en ρ = 1 no sufren desplazamiento y que ∇·u= θ(2 − 1/ρ)/5. Para calcular el campo de desplazamiento lo resolveremos primero analíticamente | ||
| + | [[Archivo:Z009.jpg]] | ||
<gallery> | <gallery> | ||
| − | + | Z010.jpg|VECTOR DE DESPLAZAMIENTO | |
| − | + | Z011.jpg|CAMPO DE DESPLAZAMIENTO | |
| − | + | Z012.jpg|RESOLUCION NUMÉRICA | |
| − | + | ||
</gallery> | </gallery> | ||
| Línea 79: | Línea 79: | ||
Con estas condiciones obteníamos que la expresión del campo de desplazamiento es: | Con estas condiciones obteníamos que la expresión del campo de desplazamiento es: | ||
<gallery> | <gallery> | ||
| − | + | Z013.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z014.jpg|SÓLIDO EN REPOSO | |
| − | + | Z015.jpg|SÓLIDO DESPUÉS DEL DESPLAZAMIENTO | |
</gallery> | </gallery> | ||
| Línea 94: | Línea 94: | ||
Puesto que e dominio de ((ρ,σ)ϵ[(1,3)x(0,π/2] la derivada direccional de (gρ) y (gθ) son positivas, también podemos deducir que cuanto mayor sean el valor de dichas variables mayor será su divergencia, alcanzado su divergencia máxima en (ρ=3,σ=π/2) ∇· u ⃗= 0.5236 , siendo así su valor menor en θ=0 con ∇· u ⃗= 0 conocido como dijimos antes como campo solenoidal. | Puesto que e dominio de ((ρ,σ)ϵ[(1,3)x(0,π/2] la derivada direccional de (gρ) y (gθ) son positivas, también podemos deducir que cuanto mayor sean el valor de dichas variables mayor será su divergencia, alcanzado su divergencia máxima en (ρ=3,σ=π/2) ∇· u ⃗= 0.5236 , siendo así su valor menor en θ=0 con ∇· u ⃗= 0 conocido como dijimos antes como campo solenoidal. | ||
<gallery> | <gallery> | ||
| − | + | Z016.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z017.jpg|DIVERGENCIA DEL CAMPO DE DESPLAZAMIENTO | |
</gallery> | </gallery> | ||
| Línea 105: | Línea 105: | ||
Así pues, procederemos a calcular el rotacional analíticamente del campo de desplazamientos (u ) en todos los puntos del sólido | Así pues, procederemos a calcular el rotacional analíticamente del campo de desplazamientos (u ) en todos los puntos del sólido | ||
<gallery> | <gallery> | ||
| − | + | Z018.jpg|CALCULO DE EL ROTACIONAL | |
| − | + | Z019.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z020.jpg|ROTACIONAL | |
</gallery> | </gallery> | ||
| Línea 120: | Línea 120: | ||
Para resolver dicha ecuación trabajaremos con matrices para simplificar el cálculo del tensor de tensiones. | Para resolver dicha ecuación trabajaremos con matrices para simplificar el cálculo del tensor de tensiones. | ||
<gallery> | <gallery> | ||
| − | + | Z022.jpg|RESOLUCIÓN MATRICIAL | |
</gallery> | </gallery> | ||
| Línea 129: | Línea 129: | ||
τ(1,2)=τ(2,1)=((ρ-1))/5ρ^2 | τ(1,2)=τ(2,1)=((ρ-1))/5ρ^2 | ||
<gallery> | <gallery> | ||
| − | + | Z023.jpg|TENSIONES EN LA DIRECCIÓN DE LA BASE CILÍNDRICA | |
</gallery> | </gallery> | ||
<gallery> | <gallery> | ||
| − | + | Z024.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z025.jpg|TENSIONES EN 2D Y 3D | |
</gallery> | </gallery> | ||
| Línea 142: | Línea 142: | ||
<gallery> | <gallery> | ||
| − | + | Z026.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z027.jpg|TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL A gρ EN 3D | |
| − | + | Z028.jpg|TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL A gρ EN 2D | |
</gallery> | </gallery> | ||
| Línea 152: | Línea 152: | ||
La tensión de Von Mises puede calcularse fácilmente a partir de las tensiones principales del tensor tensión en un punto del solido deformable, mediante la siguiente expresión | La tensión de Von Mises puede calcularse fácilmente a partir de las tensiones principales del tensor tensión en un punto del solido deformable, mediante la siguiente expresión | ||
<gallery> | <gallery> | ||
| − | + | Z030.jpg|ECUACION VON MISES (TENSIONES PRINCIPALES) | |
</gallery> | </gallery> | ||
donde σ1, σ2 y σ3 son los autovalores de σ (también conocidos como tensiones principales). Se trata de una magnitud escalar que se suele usar como indicador para saber cuando un material inicia un comportamiento plástico (y no elástico puro). | donde σ1, σ2 y σ3 son los autovalores de σ (también conocidos como tensiones principales). Se trata de una magnitud escalar que se suele usar como indicador para saber cuando un material inicia un comportamiento plástico (y no elástico puro). | ||
| Línea 158: | Línea 158: | ||
<gallery> | <gallery> | ||
| − | + | Z029.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z031.jpg|TENSIÓN DE VON MISES | |
</gallery> | </gallery> | ||
| Línea 166: | Línea 166: | ||
Calcularemos la masa total del solido a través de la función densidad expresada en coordenadas cartesianas a través de la ecuación d(x,y)=1+e ^[−|x|/(y+1)^2] . Así calcularemos la masa aproximando la integral correspondiente numéricamente | Calcularemos la masa total del solido a través de la función densidad expresada en coordenadas cartesianas a través de la ecuación d(x,y)=1+e ^[−|x|/(y+1)^2] . Así calcularemos la masa aproximando la integral correspondiente numéricamente | ||
<gallery> | <gallery> | ||
| − | + | Z032.jpg|RESOLUCIÓN NUMÉRICA | |
| − | + | Z033.jpg|MASA TOTAL DEL SÓLIDO | |
</gallery> | </gallery> | ||
Revisión del 01:59 5 dic 2019
VISUALIZACIÓN DE CAMPOS VECTORIALES Y ESCALARES EN ELASTICIDAD
En la realidad es natural trabajar con magnitudes escalares y vectoriales en regiones conexas planas. Siendo un campo escalar una función de varias variables en la que a cada punto del solido se un escalar , mientras que un campo vectorial asignara a cada punto un vector Particularmente estudiaremos diferentes campos en un solido circular con forma de un cuarto de anillo situado en el primer cuadrante y comprendido entre los radios 1 y 3. Para facilitar el trabajo con dicho sólido usaremos coordenadas cilíndricas con radio 1 y 3 y ángulo comprendido entre 0 y π/2. .
Para ello estudiaremos en nuestro solido: MALLADO DE LA SUPERFICIE DISTRIBUCIÓN DE LA TEMPERATURA GRADIENTE DE LA TEMPERATURA CAMPO DE DESPLAZAMIENTO MOVIMIENTO DEL SOLIDO DIVERGENCIA ROTACIONAL TENSOR DE TENSIONES TENSIONES TANGENCIALES TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL TENSIÓN DE VON MISES MASA TOTAL DEL SÓLIDO
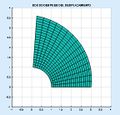
1. MALLADO DE UNA SUPERFICIE CIRCULAR
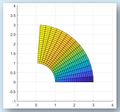
El mallado expresa los puntos interiores de un solido. Por tanto representaremos una malla que refleje dichos puntos de una superficie circular centrada en el origen delimitada por las circunferencias de radio 1 y 3 y ángulo de 0 a π/2. Dicho mallado lo expresaremos en coordenadas cilíndricas siendo p[1,3] y θ Є [0,π/2]. estableciendo los limites de los ejes de representación en (x, y) ∈ [−1, 4] × [-1, 4].

RESOLUCIÓN NUMÉRICA

MALLADO DE CUARTO DE ANILLO


ES IMPORTANTE REALIZAR EL MALLADO DEL SOLIDO A ESTUDIAR PUES PRETENDEMOS OBTENER EL MAYOR NUMERO DE PUNTOS DEL OBJETO PARA APLICAR A CADA UNO DE ELLOS LOS CAMPOS ESCALARES Y VECTORIALES CORRESPONDIENTES Podemos observar que la frontera izquierda del anillo no llega a completar el ángulo de π/2. Este error se debe a la imprecisión del paso de muestro de h=0.1, si el valor de dicha variable fuera menor por ejemplo h=0.01 observaríamos como si se completaría el cuarto de anillo.
2. DISTRIBUCIÓN DE TEMPERATURAS A LO LARGO DEL CUARTO DEL ANILLO.
La temperatura se distribuye dentro del cuarto de anillo siguiendo la siguiente función T(x, y) = (y + 2)x 2 Mediante curvas de nivel que observamos en la siguiente imagen, podemos intuir la distribución de temperaturas a lo largo del solido, ya que dichas curvas muestran los puntos que se encuentran a la misma temperatura

RESOLUCIÓN NUMÉRICA
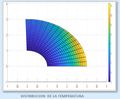
DISTRIBUCIÓN DE LA TEMPERATURA
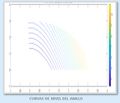
CURVAS DE NIVEL DEL ANILLO



Observamos en la primera imagen la distribución de temperatura ,mientras que en la gráfica de la izquierda las curvas de nivel del solido.
Gracias al comando máx de MaTlab obtenemos que la máxima temperatura alcanzada por el sólido tiene valor de 24.1902 K
3. GRADIENTE DE LA TEMPERATURA ∇T
Gradiente térmico o gradiente de temperatura es la variación de temperatura por unidad de distancia. La unidad de gradiente térmico en el SI es [K/m]. Normalmente, la existencia de un gradiente térmico provoca la transferencia de calor desde los puntos mas calientes del cuerpo hacia los mas fríos. El módulo de los vectores del gradiente representa la rapidez con la que varía la temperatura , es decir apunta hacia donde la derivada dirección es máxima.

RESOLUCIÓN NUMÉRICA
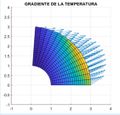
GRADIENTE DE LA TEMPERATURA

GRADIENTE APLICADO EN LAS CURVAS DE NIVEL



Gráficamente podemos observar que los vectores del gradiente son perpendiculares a la superficie del sólido
4. CAMPO DE DESPLAZAMIENTO
Cada vector del campo de desplazamiento representa la fuerza aplicada en cada punto del solido y nos indica a dirección de desplazamiento que lleva cada uno.
Consideramos el campo de desplazamiento u ⃗con condiciones establecidas como que los puntos situados en ρ = 1 no sufren desplazamiento y que ∇·u= θ(2 − 1/ρ)/5. Para calcular el campo de desplazamiento lo resolveremos primero analíticamente


VECTOR DE DESPLAZAMIENTO

CAMPO DE DESPLAZAMIENTO

RESOLUCION NUMÉRICA


5. SÓLIDO EN REPOSO Y SOLIDO DESPLAZADO
En el apartado anterior calculamos el vector desplazamiento del sólido u con condiciones establecidas como que los puntos situados en ρ = 1 no sufren desplazamiento y que
∇· u= θ(2 − 1/ρ)/5.
Con estas condiciones obteníamos que la expresión del campo de desplazamiento es:

RESOLUCIÓN NUMÉRICA

SÓLIDO EN REPOSO
SÓLIDO DESPUÉS DEL DESPLAZAMIENTO



6. DIVERGENCIA ∇·u
La divergencia del campo térmico mide la diferencia entre el flujo saliente y el entrante de un campo vectorial sobre la superficie que rodea, por tanto si el campo tiene ‘’ fuentes’’ tendrá signo positivo por lo contrario, si tiene ‘’sumideros’’ tendrá signo negativo. Podríamos decir que la divergencia mide la rapidez neta con la que se conduce la temperatura al exterior en cada punto, en el caso de ser igual a cero, describe al flujo incompresible de la temperatura, también conocido como campo solenoidal
La divergencia se expreso anteriormente con la siguiente expresión ∇· u ⃗= (θ(2 - 1/p))/5 evaluaremos los máximos mínimos y nulos de la divergencia con el gradiente de la divergencia que adquiere la siguiente expresión ∇(∇·(u))= θ/(5ρ^2 ) (gρ) +(2-1/ρ)/5 1/ρ^2 (gθ)+0 (gz) .
Puesto que e dominio de ((ρ,σ)ϵ[(1,3)x(0,π/2] la derivada direccional de (gρ) y (gθ) son positivas, también podemos deducir que cuanto mayor sean el valor de dichas variables mayor será su divergencia, alcanzado su divergencia máxima en (ρ=3,σ=π/2) ∇· u ⃗= 0.5236 , siendo así su valor menor en θ=0 con ∇· u ⃗= 0 conocido como dijimos antes como campo solenoidal.

RESOLUCIÓN NUMÉRICA
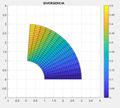
DIVERGENCIA DEL CAMPO DE DESPLAZAMIENTO


7. ROTACIONAL ∇ x u
Rotacional es un operador vectorial que muestra la tendencia de un campo a inducir rotación alrededor de un punto. También se define como circulación el vector sobre el camino cerrado del borde de un área con dirección normal a ella misma cuando el área tiende a cero. En el caso de que el campo fura conservativo el rotacional sería cero.
Así pues, procederemos a calcular el rotacional analíticamente del campo de desplazamientos (u ) en todos los puntos del sólido

CALCULO DE EL ROTACIONAL

RESOLUCIÓN NUMÉRICA
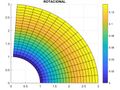
ROTACIONAL


8. TENSOR DE TENSIONES
En mecánica de medios continuos σ representa el tensor de tensiones que define la distribución de tensiones en un medio elástico lineal, isótropo y homogéneo. las tensiones no tienen por qué ser planas y puede haber tensiones en la dirección ortogonal al plano de la placa. Tomando λ = µ = 1, dibujar las tensiones normales en la dirección que marca el eje i , es decir i · σ ·i , las tensiones normales en la dirección que marca el eje j , es decir j · σ · j y las correspondientes al eje k , es decir k · σ · k Esta distribución se puede calcular mediante la fórmula:

DISTRIBUCIÓN DE TENSIONES

Para resolver dicha ecuación trabajaremos con matrices para simplificar el cálculo del tensor de tensiones.

RESOLUCIÓN MATRICIAL

Representaremos las tensiones del solido en las tres dimensiones del espacio, trabajando en coordenadas cilíndricas . por lo que tendremos que calcular las tensiones respecto a las direcciones dadas por los vectores unitarios del sistema cilíndrico [(gρ ),(gσ) ,(gz)]. Para ello multiplicaremos cada componente de la matriz σ por cada uno de los vectores de la base física. Siendo la tensión normal a la dirección gj=(gi)*σ*(gj )
Puesto que σ es simétrica las tensiones tangenciales son iguales
τ(1,2)=τ(2,1)=((ρ-1))/5ρ^2

TENSIONES EN LA DIRECCIÓN DE LA BASE CILÍNDRICA


RESOLUCIÓN NUMÉRICA

TENSIONES EN 2D Y 3D


9.TENSIONES TANGENCIALES Y TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL (gρ)
El esfuerzo cortante (tangencial al plano considerado) es aquel que viene dado por la resultante de tensiones cortantes τ, es decir, tangenciales, al área para la cual pretendemos determinar el esfuerzo cortante. Si la matriz del tensor de tensiones es simétrica entonces podemos considerar que las tensiones tangenciales son iguales

RESOLUCIÓN NUMÉRICA

TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL A gρ EN 3D
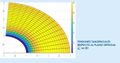
TENSIONES TANGENCIALES RESPECTO AL PLANO ORTOGONAL A gρ EN 2D



10. TENSIÓN DE VON MISES
La tensión de Von Mises es una magnitud física proporcional a la energía de distorsión. En ingeniería estructural se usa en el contexto de las teorías de fallo como indicador de un buen diseño para materiales dúctiles La tensión de Von Mises puede calcularse fácilmente a partir de las tensiones principales del tensor tensión en un punto del solido deformable, mediante la siguiente expresión

ECUACION VON MISES (TENSIONES PRINCIPALES)
donde σ1, σ2 y σ3 son los autovalores de σ (también conocidos como tensiones principales). Se trata de una magnitud escalar que se suele usar como indicador para saber cuando un material inicia un comportamiento plástico (y no elástico puro). Con el comando max obtenemos la tensión máxima de Von Mises que resulta ser 0,4793

RESOLUCIÓN NUMÉRICA
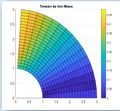
TENSIÓN DE VON MISES


11. MASA TOTAL DEL SÓLIDO
Calcularemos la masa total del solido a través de la función densidad expresada en coordenadas cartesianas a través de la ecuación d(x,y)=1+e ^[−|x|/(y+1)^2] . Así calcularemos la masa aproximando la integral correspondiente numéricamente

RESOLUCIÓN NUMÉRICA
MASA TOTAL DEL SÓLIDO

