Diferencia entre revisiones de «La Catenaria (grupo 57)»
(→Dibujo de la curva) |
|||
| Línea 34: | Línea 34: | ||
=Vectores velocidad γ'(t) y aceleración γ' '(t)= | =Vectores velocidad γ'(t) y aceleración γ' '(t)= | ||
| − | El vector velocidad representa el vector tangente a la curva en cada uno de los puntos de la misma, | + | El vector velocidad representa el vector tangente a la curva en cada uno de los puntos de la misma, este informa sobre la dirección y sentido de la curva, además su modulo no constante indica la velocidad escalar en cada punto de la misma, viene dado por la expresión: |
<br/> <center><math> \gamma'(t)=(x'(t),y'(t))=(1,\sinh(\frac{t}{3})) </math> </center> | <br/> <center><math> \gamma'(t)=(x'(t),y'(t))=(1,\sinh(\frac{t}{3})) </math> </center> | ||
<br \> | <br \> | ||
| − | El vector aceleración representa la variación de dirección y magnitud que experimenta el vector velocidad al variar el parámetro ''t'' | + | El vector aceleración representa la variación de dirección y magnitud que experimenta el vector velocidad al variar el parámetro ''t''. Se puede observar como la dirección y sentido del mismo se mantiene constante a lo largo de la curva. En este caso se expresa como: |
<br/> <center><math> \gamma''(t)=(x''(t),y''(t))=(0,\frac{1}{3}cosh(\frac{t}{3})) </math> </center> | <br/> <center><math> \gamma''(t)=(x''(t),y''(t))=(0,\frac{1}{3}cosh(\frac{t}{3})) </math> </center> | ||
==Representación en MATLAB== | ==Representación en MATLAB== | ||
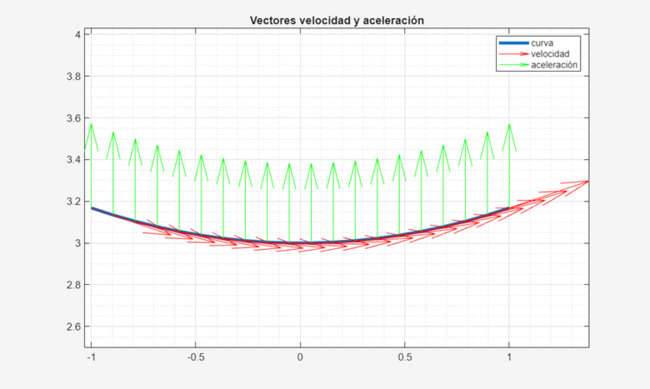
| − | [[Archivo:2.g57|miniaturadeimagen| | + | [[Archivo:2.g57|miniaturadeimagen|650px|thumb|right|Representación de vectores velocidad y aceleración junto la curva]] |
{{matlab|codigo= | {{matlab|codigo= | ||
% parametrizamos la curva; | % parametrizamos la curva; | ||
| Línea 67: | Línea 67: | ||
=Longitud de la curva= | =Longitud de la curva= | ||
| + | La longitud de una curva parametrizada en función de un parámetro t en un intervalo '''<math> t\in ({t_1},{t_2})</math>''' viene dada por: | ||
| + | '''<math> L=\int_{t_1}^{t_2}|γ′(t)|=</math>''', siendo '''<math> |γ'(t)|</math>''' el módulo del vector velocidad. <br \> | ||
| + | Para calcularlo se necesita el vector velocidad: <math> \gamma'(t)=(x'(t),y'(t))=(1,\sinh(\frac{t}{3})) </math> , del que obtenemos su módulo: <math> \left|\overline{\gamma}'(t) \right|=\sqrt{1 + \sinh^2\left(\frac{t}{3}\right)}</math> = <math>\sqrt{\cosh^2\left(\frac{t}{3}\right)}</math>. <br \> | ||
| + | Sustituyendo y operando en <math> t\in (-1,1)</math> se obtiene: <br \> | ||
| + | <math> L=\int_{-1}^{1}\sqrt{cosh^2(\frac{t}{3})}dt= \int_{-1}^{1}\cosh(\frac{t}{3})dt = 3(sinh(\frac{1}{3})-sinh(\frac{-1}{3}))= 6sinh(\frac{1}{3}) = 2,03724 </math> | ||
| + | |||
==Representación en MATLAB== | ==Representación en MATLAB== | ||
Revisión del 04:48 5 dic 2025
| Trabajo realizado por estudiantes | |
|---|---|
| Título | La catenaria. Grupo 57 |
| Asignatura | Teoría de Campos |
| Curso | 2025-26 |
| Autores |
|
| Este artículo ha sido escrito por estudiantes como parte de su evaluación en la asignatura | |
La catenaria es una curva ideal que representa la curva característica que adopta un cable, cuerda o cadena perfectamente flexible cuando se encuentra suspendida entre dos puntos fijos y sometida a un campo gravitatorio uniforme. Esta forma se debe al equilibrio del peso propio y la ausencia de rigidez flexional.
Cumple la ecuación:
[math] y = a \cosh\left(\frac{x}{a}\right) [/math], siendo a un numero natural mayor que 0
Para representarla se utilizará su parametrización en cartesianas y a = 3:
Contenido
- 1 Dibujo de la curva
- 2 Vectores velocidad γ'(t) y aceleración γ' '(t)
- 3 Longitud de la curva
- 4 Vectores tangente [math]\vec{t}(t)[/math] y normal [math]\vec{n}(t)[/math]
- 5 Curvatura[math]\quad\kappa(t)[/math]
- 6 Circunferencia osculatriz
- 7 Propiedades de la curva
- 8 Ejemplos de la curva en construcciones civiles
- 9 Catenaria y parábola
- 10 Catenoide
- 11 Función de densidad del catenoide
1 Dibujo de la curva
Utilizando MATLAB para la representación de la curva, se obtiene:

t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva;
plot(x,y);
axis equal;
grid minor;
2 Vectores velocidad γ'(t) y aceleración γ' '(t)
El vector velocidad representa el vector tangente a la curva en cada uno de los puntos de la misma, este informa sobre la dirección y sentido de la curva, además su modulo no constante indica la velocidad escalar en cada punto de la misma, viene dado por la expresión:
El vector aceleración representa la variación de dirección y magnitud que experimenta el vector velocidad al variar el parámetro t. Se puede observar como la dirección y sentido del mismo se mantiene constante a lo largo de la curva. En este caso se expresa como:
2.1 Representación en MATLAB
% parametrizamos la curva;
t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva;
plot(x,y,'LineWidth',3);
axis equal;
grid minor;
hold on;
% creamos el vector velocidad con sus componentes;
vi=ones(1,20);
vj=s;
% representamos el vector velocidad;
quiver(x,y,vi,vj,'r');
hold on;
% creamos el vector aceleración con sus componentes;
ai=zeros(1,20);
aj=c./3;
% representamos el vector aceleración;
quiver(x,y,ai,aj,'g');
3 Longitud de la curva
La longitud de una curva parametrizada en función de un parámetro t en un intervalo [math] t\in ({t_1},{t_2})[/math] viene dada por:
[math] L=\int_{t_1}^{t_2}|γ′(t)|=[/math], siendo [math] |γ'(t)|[/math] el módulo del vector velocidad.
Para calcularlo se necesita el vector velocidad: [math] \gamma'(t)=(x'(t),y'(t))=(1,\sinh(\frac{t}{3})) [/math] , del que obtenemos su módulo: [math] \left|\overline{\gamma}'(t) \right|=\sqrt{1 + \sinh^2\left(\frac{t}{3}\right)}[/math] = [math]\sqrt{\cosh^2\left(\frac{t}{3}\right)}[/math].
Sustituyendo y operando en [math] t\in (-1,1)[/math] se obtiene:
[math] L=\int_{-1}^{1}\sqrt{cosh^2(\frac{t}{3})}dt= \int_{-1}^{1}\cosh(\frac{t}{3})dt = 3(sinh(\frac{1}{3})-sinh(\frac{-1}{3}))= 6sinh(\frac{1}{3}) = 2,03724 [/math]