Diferencia entre revisiones de «La Catenaria (grupo 57)»
(→Ejemplos de la curva en construcciones civiles) |
(→Ejemplos de la curva en construcciones civiles) |
||
| Línea 117: | Línea 117: | ||
=Ejemplos de la curva en construcciones civiles= | =Ejemplos de la curva en construcciones civiles= | ||
Como se ha dicho, la curva catenaria está presente en diversas construcciones civiles debido a sus propiedades de equilibrio frente a cargas distribuidas provocadas por la acción de la gravedad. A continuación se exponen algunos ejemplos: <br \> | Como se ha dicho, la curva catenaria está presente en diversas construcciones civiles debido a sus propiedades de equilibrio frente a cargas distribuidas provocadas por la acción de la gravedad. A continuación se exponen algunos ejemplos: <br \> | ||
| − | [[Archivo:8.1.g57.jpg|miniaturadeimagen|250px | + | [[Archivo:8.1.g57.jpg|miniaturadeimagen|250px|center|Puente de Manhattan (Nueva York)]] |
| − | [[Archivo:8.2.g57.jpg|miniaturadeimagen|250px | + | [[Archivo:8.2.g57.jpg|miniaturadeimagen|250px|center|Gateway Arch (San Luis, Misuri)]] |
| − | [[Archivo:8.3.g57.jpg|miniaturadeimagen|250px | + | [[Archivo:8.3.g57.jpg|miniaturadeimagen|250px|center|Golden Gate Bridge (San Francisco, California)]] |
| − | [[Archivo:8.4.g57.jpg|miniaturadeimagen|250px | + | [[Archivo:8.4.g57.jpg|miniaturadeimagen|250px|center|Catenaria ferroviaria]] |
| − | [[Archivo:8.5.g57.jpg|miniaturadeimagen|250px | + | [[Archivo:8.5.g57.jpg|miniaturadeimagen|250px|center|Puente Mike O'Callaghan–Pat Tillman (EE.UU.)]] |
=Catenaria y parábola= | =Catenaria y parábola= | ||
Revisión del 12:58 5 dic 2025
| Trabajo realizado por estudiantes | |
|---|---|
| Título | La catenaria. Grupo 57 |
| Asignatura | Teoría de Campos |
| Curso | 2025-26 |
| Autores |
|
| Este artículo ha sido escrito por estudiantes como parte de su evaluación en la asignatura | |
La catenaria es una curva ideal que representa la curva característica que adopta un cable, cuerda o cadena perfectamente flexible cuando se encuentra suspendida entre dos puntos fijos y sometida a un campo gravitatorio uniforme. Esta forma se debe al equilibrio del peso propio y la ausencia de rigidez flexional.
Cumple la ecuación:
[math] y = a \cosh\left(\frac{x}{a}\right) [/math], siendo a un numero natural mayor que 0
Para representarla se utilizará su parametrización en cartesianas y a = 3:
Contenido
- 1 Dibujo de la curva
- 2 Vectores velocidad γ'(t) y aceleración γ' '(t)
- 3 Longitud de la curva
- 4 Vectores tangente [math]\vec{t}(t)[/math] y normal [math]\vec{n}(t)[/math]
- 5 Curvatura[math]\quad\kappa(t)[/math]
- 6 Circunferencia osculatriz
- 7 Propiedades de la curva
- 8 Ejemplos de la curva en construcciones civiles
- 9 Catenaria y parábola
- 10 Catenoide
- 11 Función de densidad del catenoide
1 Dibujo de la curva
Utilizando MATLAB para la representación de la curva, se obtiene:

t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva;
plot(x,y);
axis equal;
grid minor;
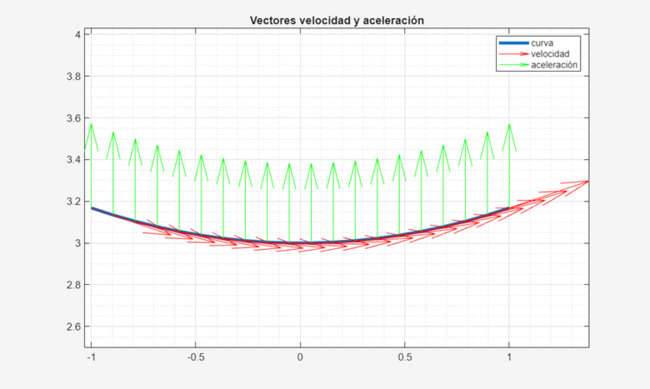
2 Vectores velocidad γ'(t) y aceleración γ' '(t)
El vector velocidad representa el vector tangente a la curva en cada uno de los puntos de la misma, este informa sobre la dirección y sentido de la curva, además su modulo no constante indica la velocidad escalar en cada punto de la misma, viene dado por la expresión:
El vector aceleración representa la variación de dirección y magnitud que experimenta el vector velocidad al variar el parámetro t. Se puede observar como la dirección y sentido del mismo se mantiene constante a lo largo de la curva. En este caso se expresa como:
2.1 Representación en MATLAB
% parametrizamos la curva;
t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva;
plot(x,y,'LineWidth',3);
axis equal;
grid minor;
hold on;
% creamos el vector velocidad con sus componentes;
vi=ones(1,20);
vj=s;
% representamos el vector velocidad;
quiver(x,y,vi,vj,'r');
hold on;
% creamos el vector aceleración con sus componentes;
ai=zeros(1,20);
aj=c./3;
% representamos el vector aceleración;
quiver(x,y,ai,aj,'g');
3 Longitud de la curva
La longitud de una curva parametrizada en función de un parámetro t en un intervalo [math] t\in ({t_1},{t_2})[/math] viene dada por:
[math] L=\int_{t_1}^{t_2}|γ′(t)|=[/math], siendo [math] |γ'(t)|[/math] el módulo del vector velocidad.
Para calcularlo se necesita el vector velocidad: [math] \gamma'(t)=(x'(t),y'(t))=(1,\sinh(\frac{t}{3})) [/math] , del que obtenemos su módulo: [math] \left|\overline{\gamma}'(t) \right|=\sqrt{1 + \sinh^2\left(\frac{t}{3}\right)}[/math] = [math]\sqrt{\cosh^2\left(\frac{t}{3}\right)}[/math].
Sustituyendo y operando en [math] t\in (-1,1)[/math] se obtiene:
[math] L=\int_{-1}^{1}\sqrt{cosh^2(\frac{t}{3})}dt= \int_{-1}^{1}\cosh(\frac{t}{3})dt = 3(sinh(\frac{1}{3})-sinh(\frac{-1}{3}))= 6sinh(\frac{1}{3}) = 2,03724 [/math]
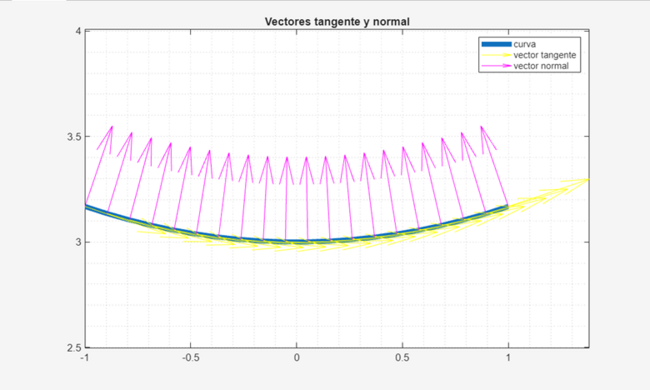
4 Vectores tangente [math]\vec{t}(t)[/math] y normal [math]\vec{n}(t)[/math]
El vector tangente [math]\vec{t}(t)[/math], unitario, indica la dirección en que avanza la curva en cada punto, se calcula como: [math]\vec{t}(t)=\frac{γ'(t)}{|γ'(t)|} [/math]
En este caso queda: [math] \vec{t}(t)=\frac{\vec{i}+sinh(\frac{t}{3})\vec{j}}{cosh(\frac{t}{3})}=sech(\frac{t}{3})\vec{i}+tanh(\frac{t}{3})\vec{j} [/math]
Por otro lado, el vector normal [math]\vec{n}(t)[/math], también unitario, apunta hacia el centro de la circunferencia que mejor se adapta a la curva, y se calcula como: [math] \vec{n}(t)=\vec{b}(t)\times\vec{t}(t) [/math], siendo [math]\vec{b}(t)[/math] el vector binormal de la curva. Como se trata de una curva plana perteneciente al plano XY, se toma [math]\vec{b}(t)=\vec{k}[/math].
Por tanto [math] \vec{n}(t)=\vec{b}(t)\times\vec{t}(t)= \begin{equation} \begin{vmatrix} \vec{i} & \vec{j} & \vec{k}\\ 0 & 0 & 1\\ sech(\frac{t}{3}) & tanh(\frac{t}{3}) & 0 \end{vmatrix}\end{equation}=-tanh(\frac{t}{3})\vec{i}+sech(\frac{t}{3})\vec{j} [/math]
4.1 Representación en MATLAB
% parametrizamos la curva
t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva
plot(x,y,'LineWidth',5)
axis equal
grid minor
hold on
% creamos el vector tangente unitario con sus componentes
tgi=1./c;
tgj=s./c;
% representamos el vector tangente unitario
quiver(x,y,tgi,tgj,'y')
hold on
% creamos el vector normal unitario exterior con sus componentes
ni=(-s)./c;
nj=1./c;
% representamos el vector normal exterior
quiver(x,y,ni,nj,'m')
5 Curvatura[math]\quad\kappa(t)[/math]
5.1 Representación en MATLAB
6 Circunferencia osculatriz
6.1 Representación en MATLAB
7 Propiedades de la curva
La curva catenaria es la geometría que asume una cadena o un cable idealizado, flexible e inextensible, cuando se encuentra suspendido en sus extremos y es sometido únicamente a la acción de la gravedad.
Su propiedad fundamental es que su configuración de equilibrio minimiza la energía potencial del cable, lo que la hace muy estable y resistente, y la convierte en una forma ideal para el soporte de cargas distribuidas uniformemente.
Debido a esto, en el campo de la ingeniería civil la curva catenaria posee una gran relevancia e interés. El diseño de estructuras como los puentes colgantes, líneas eléctricas o catenarias ferroviarias aprovechan la estabilidad y resistencia proporcionada por esta forma natural. Además, una aplicación destacada es el uso de la catenaria invertida para el diseño de arcos, ya que estos trabajan de manera óptima solo a compresión, logrando evitar esfuerzos flectores y cortantes, son conocidos como arcos funiculares.
8 Ejemplos de la curva en construcciones civiles
Como se ha dicho, la curva catenaria está presente en diversas construcciones civiles debido a sus propiedades de equilibrio frente a cargas distribuidas provocadas por la acción de la gravedad. A continuación se exponen algunos ejemplos:




