Diferencia entre revisiones de «La Catenaria»
(→Representación de la curva) |
(→Curvatura y gráfica) |
||
| (No se muestran 300 ediciones intermedias de 3 usuarios) | |||
| Línea 1: | Línea 1: | ||
| − | La catenaria | + | {{ TrabajoED | La Catenaria. Grupo 12 | [[:Categoría:Teoría de Campos|Teoría de Campos]]|[[:Categoría:TC23/24|2023-24]] | Alejandro Jiménez García <br/> Marta García-Moris Fontcuberta <br/> Alejandro Seises López <br/> Alberto Nuñez Cobo <br/> Álvaro Matías Acedo }} |
| + | En matemáticas y arquitectura se emplea la palabra '''catenaria''' para designar la curva cuyo trazado sigue la forma que adquiere una cadena o cuerda de densidad uniforme y perfectamente flexible sujeta por sus dos extremos y que se encuentra sometida únicamente a las fuerzas de la gravedad. En sentido estricto no se trata de una curva, sino una familia de curvas en la que cada una de ellas viene determinada por las coordenadas de sus extremos (x0,y0),(x1,y1) y por su longitud. | ||
<br/> | <br/> | ||
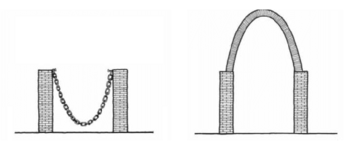
| + | <br/>Ha desempeñado un papel esencial en la '''ingeniería civil''' a lo largo de la historia, utilizándose como herramienta resistente y segura en diversas estructuras, siendo los puentes colgantes y los cables de alta tensión dos de los ejemplos más famosos. La catenaria permite distribuir de manera uniforme las fuerzas y cargas, contribuyendo a la resistencia y estabilidad estructural. Su aplicación en cables de alta tensión facilita la creación de sistemas de transmisión eficientes, capaces de cubrir extensas distancias con mínimas deformaciones. Al ir colocando vectores fuerza en la catenaria, las curvas que se obtienen se denominan curvas funiculares, de forma que si se voltea una catenaria (se invierte su geometría) queda un arco que hereda las buenas propiedades de la curva inicial, además, como carece de tensiones laterales, se minimizan los esfuerzos de compresión sobre el arco, lo que permite obtener arcos de gran altura con mínimos empujes laterales. | ||
<br/> | <br/> | ||
| − | + | [[Archivo:Catenary-pm.svg|350px|centre]] | |
| + | <br/> | ||
| + | <br/> | ||
| + | |||
==Representación de la curva == | ==Representación de la curva == | ||
Se tiene la siguiente curva plana parametrizada en coordenadas cartesianas que representa una catenaria: | Se tiene la siguiente curva plana parametrizada en coordenadas cartesianas que representa una catenaria: | ||
<br/> | <br/> | ||
| − | <br/> '''<math> γ(t) = (x(t),y(t)) = (t,cosh(t)), t∈(-1,1)</math>''' | + | <br/> '''<center><math> γ(t) = (x(t),y(t)) = (t,cosh(t)), t∈(-1,1)</math></center>''' |
<br/> | <br/> | ||
| − | <br/> Donde: | + | <br/> Donde: <math>γ:t\to\mathbb{R}^2</math> |
| − | + | ||
| − | + | ||
<br/> | <br/> | ||
<br/>Para dibujarla hacemos uso del software de programación y cálculo numérico Matlab/Octave. | <br/>Para dibujarla hacemos uso del software de programación y cálculo numérico Matlab/Octave. | ||
| − | + | [[Archivo:Catenaria.png|550px|miniaturadeimagen|derecha|Representación gráfica de la catenaria]] | |
| − | [[Archivo:Catenaria.png| | + | |
{{matlab|codigo= | {{matlab|codigo= | ||
% Definición de los parámetros | % Definición de los parámetros | ||
| Línea 35: | Línea 37: | ||
grid minor | grid minor | ||
}} | }} | ||
| + | |||
| + | <br/> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | <br/> | ||
==Vectores velocidad y aceleración== | ==Vectores velocidad y aceleración== | ||
| − | Siendo <math> γ(t) </math> el vector posición: | + | Siendo <math> γ(t) </math> el '''vector posición''': |
<br /> | <br /> | ||
| − | |||
<br /> | <br /> | ||
| + | <center><math>γ(t) = (x(t),y(t)) = (t,cosh(t)) = t \vec i + cosh(t) \vec j </math></center> | ||
<br /> | <br /> | ||
| − | |||
<br /> | <br /> | ||
| + | El '''vector velocidad''' <math> γ´(t) </math> es la derivada con respecto al tiempo del vector posición. | ||
<br /> | <br /> | ||
| − | |||
<br /> | <br /> | ||
| + | <center><math> γ´(t) = \vec i + senh(t) \vec j </math></center> | ||
<br /> | <br /> | ||
| − | <math> γ´´(t) | + | <br /> |
| + | El '''vector aceleración''' <math> γ´´(t) </math> es la derivada segunda de la posición con respecto al tiempo (derivada de la velocidad con respecto al tiempo). | ||
| + | <br /> | ||
| + | <br /> | ||
| + | <center><math> γ´´(t) = cosh(t) \vec j</math></center> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
Los vectores velocidad y aceleración se representan gráficamente usando el siguiente código: | Los vectores velocidad y aceleración se representan gráficamente usando el siguiente código: | ||
| − | [[Archivo:Catenaria 2.png| | + | <br /> |
| + | [[Archivo:Catenaria 2.png|650px|miniaturadeimagen|derecha|Vector velocidad y vector aceleración]] | ||
{{matlab|codigo= | {{matlab|codigo= | ||
% Definición de los parámetros | % Definición de los parámetros | ||
| Línea 90: | Línea 102: | ||
==Longitud de la curva== | ==Longitud de la curva== | ||
| + | La '''longitud de una curva''' se calcula mediante la siguiente fórmula: | ||
| + | <br /> | ||
| + | <center><math> ℓ(γ) = \int_{a}^{b}|γ′(t)|=\int_{a}^{b}\sqrt {x´(t)^2 +y´(t)^2}dt= \int_{-1}^{1}\sqrt{1^2 +sinh^2(t)}dt</math></center> | ||
| + | <br /> | ||
La longitud de la curva se ha calculado a través del Método del Rectángulo usando el siguiente código: | La longitud de la curva se ha calculado a través del Método del Rectángulo usando el siguiente código: | ||
{{matlab|codigo= | {{matlab|codigo= | ||
| Línea 107: | Línea 123: | ||
}} | }} | ||
| + | El programa nos da como resultado L = 2,35 m | ||
| − | + | ==Vector tangente y vector normal== | |
| − | |||
| − | + | ===Vector tangente=== | |
| + | El vector velocidad representa los vectores tangentes a la trayectoria parametrizada por <math>\gamma(t)</math>, por tanto, | ||
| + | para obtener los vectores tangentes unitarios hay que dividir por el módulo. | ||
| + | <br/> | ||
| − | = | + | <center><math> \vec t(t)=\frac{γ′(t)}{|γ′(t)|}=\frac{x´(t)\vec i +y´(t)\vec j}{\sqrt{x´(t)^2 + y´(t)^2}}=\frac{1}{\sqrt{1^2 + senh(t)^2}} * (\vec i + senh(t)\vec j )</math></center> |
| − | + | <br/> | |
| − | + | [[Archivo:Catenaria4.png|480px|miniaturadeimagen|derecha|Vector tangente]] | |
| − | [[Archivo:Catenaria4.png| | + | |
{{matlab|codigo= | {{matlab|codigo= | ||
x=t; | x=t; | ||
| Línea 142: | Línea 160: | ||
grid minor | grid minor | ||
}} | }} | ||
| − | === | + | |
| + | ===Vector normal=== | ||
| + | Los vectores normales obtienen girando un ángulo <math>\frac{\pi}{2}</math> los vectores tangentes (son vectores ortogonales). De esa forma: | ||
| + | <br/> | ||
| + | <br/> Vector <math>γ′(t)</math> girado mediante '''matriz de rotación''' para <math>\theta =\frac{\pi}{2}</math>: | ||
| + | <center><math> \begin{pmatrix}cos(\frac{\pi}{2}) & -sen(\frac{\pi}{2}) \\ sen(\frac{\pi}{2}) & cos(\frac{\pi}{2}) \\ \end{pmatrix} \begin{pmatrix}x´(t)\\y´(t))\\ \end{pmatrix} = -y´(t)\vec i +x´(t)\vec j </math></center> | ||
| + | Entonces: | ||
| + | <br/> <center><math>\vec n(t)=\frac{-y´(t)\vec i +x´(t)\vec j}{\sqrt{x´(t)^2 + y´(t)^2}}=\frac{1}{\sqrt{1+senh(t)^2}}*(-senh(t)\vec i +1\vec j) </math></center> | ||
| + | <br/> | ||
[[Archivo:Catenaria5.png|550px|miniaturadeimagen|derecha|Vector normal]] | [[Archivo:Catenaria5.png|550px|miniaturadeimagen|derecha|Vector normal]] | ||
{{matlab|codigo= | {{matlab|codigo= | ||
| Línea 179: | Línea 205: | ||
==Curvatura y gráfica== | ==Curvatura y gráfica== | ||
| − | + | La '''curvatura''' <math>κ(t)</math> indica que alrededor del punto <math>γ(t)</math> la curva que mejor se aproxima a la catenaria, es la circunferencia de curvatura <math>κ(t)</math>,es decir, mide la desviación de ser recta en cada punto de la curva. | |
| − | === | + | |
| + | <br/>Se calcula de la siguiente manera: | ||
| + | <br/><center><math>Curvatura: κ(t)=\frac{x´(t)y´´(t)-x´´(t)y´´(t)}{(x´(t)^2+y´(t)^2)^\frac{3}{2}}=\frac{cosh(t)-0senh(t)}{(1^2+senh(t)^2)^\frac{3}{2}}= \frac{cosh(t)}{(1+sinh^2(t))^\frac{3}{2}} </math></center> | ||
| + | <br/> | ||
| + | |||
| + | <br/> | ||
| + | |||
{{matlab|codigo= | {{matlab|codigo= | ||
| − | + | n =70; | |
| − | + | t = linspace ( -1 , 1 , n) ; | |
| − | + | k = cosh(t)./((1+(sinh(t)).^2)).^(3/2) ; | |
| − | t | + | figure |
| − | + | plot (t ,k ,'b') ; | |
| − | + | axis equal | |
| + | title ('Curvatura kappa (t). ') ; | ||
| + | xlabel('t'); | ||
| + | ylabel('\kappa(t)'); | ||
grid on | grid on | ||
| − | + | ||
}} | }} | ||
| − | [[Archivo: | + | <br/> |
| + | [[Archivo:Curvatura1.jpg|550px|miniaturadeimagen|centre|Curva y gráfica]] | ||
| − | ==Circunferencia osculatriz en t=0== | + | ==Circunferencia osculatriz == |
| − | + | La '''circunferencia osculatriz''' es una circunferencia que proporciona la mejor aproximación local a una curva en un punto específico. En el contexto de una catenaria <math>γ(t)</math> en el plano, la circunferencia osculatriz en un punto \(P\) de la curva tiene su '''centro''' en: <center><math>Q(t) = γ(t) + \frac{1}{κ(t)} \vec{n}(t)</math></center> y su radio es el inverso del módulo de la curvatura en ese punto,es decir, su '''radio''' es: <center><math>R(t)=\frac{1}{|κ(t)|}</math></center> donde <math>κ(t)</math> es la curvatura de la catenaria en el punto \(P\). | |
| + | <br/> La circunferencia osculatriz proporciona una buena aproximación a la curva en las proximidades del punto \(P\). | ||
| + | <br/> | ||
| + | <br/>En este caso, en el punto \(P=γ(0)\) , \(t=0\) | ||
| + | <br/> | ||
| + | <br/><center><math>Q(t) = γ(t) + \frac{1}{κ(t)} \vec{n}(t)= (t,cosh(t))+ \frac{1}{\frac{cosh(t)}{(1+sinh^2(t))^\frac{3}{2}}} \frac{1}{\sqrt{1+sinh(t)^2}} (-sinh(t)\vec i + 1 \vec j)</math></center> | ||
| + | <br/> | ||
| + | <br/><center><math>Q(0) = γ(0) + \frac{1}{κ(0)} \vec{n}(0)= (0 \vec i + cosh(0) \vec j) \frac{1}{\frac{cosh(0)}{(1+sinh^2(0))^\frac{3}{2}}} \frac{1}{\sqrt{1+sinh(0)^2}} (-sinh(0)\vec i + 1 \vec j)=0 \vec i + 2 \vec j =2 \vec j </math></center> | ||
| + | <br/> | ||
| + | <br/><center><math>R(t)=\frac{1}{|κ(t)|}= \frac{1}{|\frac{cosh(t)}{(1+sinh^2(t))^\frac{3}{2}}|} </math></center> | ||
| + | <br/> | ||
| + | <br/><center><math>R(0)=\frac{1}{|κ(0)|} = \frac{1}{|\frac{cosh(0)}{(1+sinh^2(0))^\frac{3}{2}}|} = \frac{1}{1} = 1m </math></center> | ||
| + | <br/> | ||
[[Archivo:Catenar5.jpg|600px|miniaturadeimagen|derecha|Circunferencia osculatriz]] | [[Archivo:Catenar5.jpg|600px|miniaturadeimagen|derecha|Circunferencia osculatriz]] | ||
| + | |||
{{matlab|codigo= | {{matlab|codigo= | ||
% Definimos el radio y el centro de la circunferencia | % Definimos el radio y el centro de la circunferencia | ||
| Línea 232: | Línea 281: | ||
==Fenómeno descrito por la curva== | ==Fenómeno descrito por la curva== | ||
| + | ===Catenaria=== | ||
| + | Sea una cadena de bolitas metálicas, supondremos que hay N bolitas igualmente repartidas sobre un hilo de longitud L y de masa despreciable. Cada bolita estará, por tanto, sometida a tres fuerzas: su propio peso, la fuerza que ejerce el hilo a su izquierda y a su derecha. | ||
| + | [[Archivo:Catenariafenomeno.png|450px|centro]] | ||
| + | ''Relaciones importantes:'' | ||
| + | <br/> | ||
| + | <br/> Para un punto de la catenaria, con un plano de comparación y siendo: | ||
| + | <br/> | ||
| + | <br/> - <math> T_H: </math> la tensión horizontal en el punto | ||
| + | |||
| + | <br/> - <math> a=\frac{T_H}{mg} : </math> el parámetro de la catenaria(altura del punto más bajo con respecto al plano de comparación) | ||
| + | |||
| + | <br/> - <math> z: </math> la altura del punto con relación al plano de comparación | ||
| + | |||
| + | <br/> - <math> x: </math> la distancia horizontal al plano de comparación | ||
| + | |||
| + | <br/> | ||
| + | <br/>La longitud de la curva <math>(l)</math> es: | ||
| + | <center><math>l = a\sinh\left(\frac{x}{a}\right) \,\!</math></center> | ||
| + | Ecuación de la catenaria: | ||
| + | <center><math>z = a\cosh\left(\frac{x}{a}\right) \,\!</math></center> | ||
| + | La tensión vertical es: | ||
| + | <center><math> T_y = T_H \sinh\left(\frac{x}{a}\right) \,\!</math></center> | ||
| + | |||
| + | La tensión total del hilo es | ||
| + | <center><math>T =\sqrt{T_H^2 + T_y^2} \,\!</math></center> | ||
| + | |||
| + | ===Arco catenario=== | ||
| + | Se conoce como arco catenario al arco que reproduce exactamente la morfología de una '''curva catenaria invertida'''. Todas las características matemáticas de la catenaria se conservan cuando su gráfica se invierte. | ||
| + | <Br/> | ||
| + | <gallery class="center" heights="350px" widths="350px"> | ||
| + | File:Arcocatenario1.png|Arco catenario | ||
| + | File:Arcocatenario2.png|Distribución de cargas | ||
| + | </gallery> | ||
| + | <Br/> | ||
| + | El '''arco catenario''' es la forma ideal para el arco que se soporta a sí mismo. Cuando está construido de elementos individuales cuyas superficies son perpendiculares a la curva del arco, el empuje al apoyo se transmite a lo largo de la línea del arco (existe exclusivamente esfuerzo axil). Además, cuanto mayor es la altura, más pequeño es el empuje horizontal en los puntos de arranque, con lo que se pueden obtener grandes alturas con mínimos empujes laterales. Del arco catenario derivan los arcos '''funiculares''' ('''antifuniculares''' para geometría invertida) que tienen también óptimas características constructivas y que se pueden obtener con facilidad reproduciendo los efectos de cargas puntuales sobre una curva catenaria. Estos últimos son muy utilizados en ingeniería civil para salvar grandes vanos como alternativa a los puentes colgantes. | ||
| + | <Br/> | ||
| + | [[Archivo:Antifunicularcatenaria.png|350px|centro]] | ||
| + | <Br/> | ||
| + | |||
| + | ===Diferencias con la parábola=== | ||
| + | |||
| + | Si observamos superpuestas las gráficas de una catenaria y una parábola podemos entender porqué los antiguos matemáticos en un principio suponían que era la parábola la curva que se combaba bajo su propio peso. | ||
| + | <br/> El desarrollo de las fórmulas matemáticas de una catenaria y una parábola coincide en sus tres primeros términos (y = a+ bx+ cx2) y solo a partir del cuarto ambas expresiones se diferencian (pudiendo existir en los últimos términos de la expresión de la catenaria x elevadas a potencias mayores). Esto hace que las gráficas de ambas curvas se parezcan para valores pequeños de la x, mostrando su diferencia según aumentan los valores de ésta. | ||
| + | <br/> | ||
| + | [[Archivo:Catenaria-parabola.png|350px|centro]] | ||
| + | <br/> | ||
| + | La '''mayor diferencia''' entre las curvas corresponde a sus respectivas '''tangentes''', en la catenaria el valor de la tangente tiende a la verticalidad mientras que en la parábola este valor tiene a una constante. Esto condiciona que en la catenaria, para valores infinitos de la y, la x tiende a valores limitados, mientras que en la parábola para los valores infinitos de la y se obtienen valores infinitos de la x. Ésta debería ser la característica que hiciese prevalecer a los arcos catenarios frente a los parabólicos, pero a pesar de la óptima calidad del arco catenario, así como de otras formas estáticamente estables, como la parábola invertida u otros arcos antifuniculares, durante mucho tiempo se consideró que tenían formas poco elegantes y no se utilizaron | ||
==Empleo de la curva en Ingeniería Civil== | ==Empleo de la curva en Ingeniería Civil== | ||
| − | La catenaria en ingeniería civil es una curva muy común, al tratarse de una curva natural sometida a su propio peso. Este fenómeno de una cuerda o cable sometido a gravedad se da en los cables principales de los puentes colgantes, que es el cable de donde cuelgan | + | La catenaria en ingeniería civil es una curva muy común, al tratarse de una curva natural sometida a su propio peso. Este fenómeno de una cuerda o cable sometido a gravedad se da en los cables principales de los '''puentes colgantes''', que es el cable de donde cuelgan las péndolas que se anclan al tablero. Un ejemplo de un puente de esta tipología puede ser el Golden Gate en San Francisco (Estados Unidos). Otro fenómeno en el que interviene esta curva es en las '''líneas eléctricas ferroviarias''', que son los cables de donde se obtiene la energía eléctrica del tren. Estos cables cuelgan sometidos a su propio peso de unos elementos llamados catenarias dando lugar a la curva en cuestión. Es importante mencionar, que esta curva aparece también en los '''puentes de tipo arco con tablero superior''' (antifunicular), como puede ser el Puente de Gudián (Galicia). |
| − | + | <br/> | |
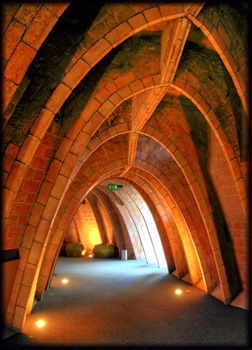
| − | + | El arquitecto español '''Antonio Gaudí''' usó ampliamente la catenaria en sus construcciones, este solía decir "La catenaria da elegancia y espiritualidad al arco, elegancia y espiritualidad a la construcción, evita contrafuertes, el edificio pesa menos, gana una gracia vaporosa y se aguanta sin raros accesorios ortopédicos". Hay arcos catenarios en la Casa Battló, en el Colegio de las Teresianas, en la Casa Milà o en la Sagrada Familia. | |
| + | <br/> | ||
| + | <br/> | ||
| + | <gallery class="center" heights="350px" widths="350px"> | ||
| + | File:Goldengate.jpg|Golden Gate Bridge | ||
| + | File:Caten5.png|Catenaria Madrid-Aranjuez | ||
| + | File:Cates5.png|Puente de Gudián (Galicia) | ||
| + | File:Gaudii.jpeg|Catenaria en la casa Milà de Antonio Gaudí | ||
| + | </gallery> | ||
| + | <br/> | ||
| + | ===Obras Modernas=== | ||
| + | ''Gateway Arch'' | ||
| + | <br/> | ||
| + | Probablemente la obra arquitectónica con forma de catenaria más famosa del siglo XX, se encuentra en Misuri, es el monumento nacional más alto de los Estados Unidos de América con una altura de 192 metros, distancia que es exactamente igual, pese a que la ilusión óptica sugiera lo contrario, a la separación existente entre los dos puntos de arranque a nivel del suelo. | ||
| + | <br/> | ||
| + | [[Archivo:Gateway_Arch.jpg|350px|centro|Gateway Arch]] | ||
| + | <br/> | ||
| + | ''Kingdom Centre'' | ||
| + | <br/> | ||
| + | Otro espectacular ejemplo de catenaria, aunque en este caso el uso es más estético que estructural, lo podemos encontrar en Oriente medio, en concreto en Riad. | ||
| + | <br/> | ||
| + | [[Archivo:kingdomcentre.jpg|500px|centro|Kingdom Centre en Riad]] | ||
| + | <br/> | ||
==Superficie de revolución alrededor del eje vertical== | ==Superficie de revolución alrededor del eje vertical== | ||
| + | Un '''catenoide''' es una superficie mínima que se genera mediante la rotación de una catenaria alrededor de su eje vertical, como curiosidad, esta fue la primera superficie mínima descubierta tras el plano. | ||
| + | <br/> | ||
Podemos ver la catenaria en mediante la siguiente parametrización en coordenadas cartesianas en <math> \mathbb{R}^3 </math>: | Podemos ver la catenaria en mediante la siguiente parametrización en coordenadas cartesianas en <math> \mathbb{R}^3 </math>: | ||
| − | <br/> '''<math> γ(t) = (x(t),y(t),z(t)) = (0,cosh(t),t), t∈(-1,1)</math>''' | + | <br/> '''<center><math> γ(t) = (x(t),y(t),z(t)) = (0,cosh(t),t), t∈(-1,1)</math></center>''' |
<br/> Donde: | <br/> Donde: | ||
| − | <br/><math>γ:t\to\mathbb{R}^3</math> | + | <br/><center><math>γ:t\to\mathbb{R}^3</math></center> |
<br/>Para obtener la superficie de revolución hacemos uso del software de programación y cálculo numérico Matlab/Octave. | <br/>Para obtener la superficie de revolución hacemos uso del software de programación y cálculo numérico Matlab/Octave. | ||
| − | |||
| − | |||
| − | |||
{{matlab|codigo= | {{matlab|codigo= | ||
% Parámetros | % Parámetros | ||
| Línea 266: | Línea 383: | ||
grid on; | grid on; | ||
}} | }} | ||
| + | <gallery class="center" heights="350px" widths="350px"> | ||
| + | File:Catenoide .jpg|Superficie | ||
| + | File:Catenoide.gif|Catenoide | ||
| + | </gallery> | ||
==Distribución de la densidad a lo largo de la superficie== | ==Distribución de la densidad a lo largo de la superficie== | ||
| − | La densidad de la superficie es <math>f(x,y,z)=z^2(x,y,z)=z^2</math>. Para obtener cómo se distribuye la densidad en la superficie, se puede considerar la variación de <math>f</math> en la parametrización de la superficie. En este caso, la parametrización queda <math>x(u,v)=(cosh(u)cos(v),cosh(u)sin(v),u)</math>. | + | La densidad de la superficie es <math>f(x,y,z)=z^2(x,y,z)=z^2</math>. Para obtener cómo se distribuye la densidad en la superficie, se puede considerar la variación de <math>f</math> en la parametrización de la superficie. <br/> En este caso, la parametrización queda <math>x(u,v)=(cosh(u)cos(v),cosh(u)sin(v),u)</math>. |
| − | Siendo la densidad <math>f</math> a lo largo de la superficie: | + | <br/>Siendo la '''densidad''' <math>f</math> a lo largo de la superficie: |
| − | <math>f(u,v)=z^2(u,v)=u^2</math> | + | <center><math>f(u,v)=z^2(u,v)=u^2</math></center> |
| − | De lo que se deduce que la densidad aumenta cuadráticamente con respecto a <math>u</math>, la coordenada a lo largo del eje <math>z</math>, es decir, a mayor distancia del eje <math>z</math>, mayor es la densidad. | + | <br/>De lo que se deduce que la densidad aumenta cuadráticamente con respecto a <math>u</math>, la coordenada a lo largo del eje <math>z</math>, es decir, a mayor distancia del eje <math>z</math>, mayor es la densidad. Una vez conocida la distribución de la densidad en la superficie, se puede calcular la masa de la superficie. |
| − | + | ||
| − | Una vez conocida la distribución de la densidad en la superficie, se puede calcular la masa de la superficie. | + | |
===Cálculo de la masa de la superficie conociendo la densidad en la superficie=== | ===Cálculo de la masa de la superficie conociendo la densidad en la superficie=== | ||
| − | La masa de la superficie se obtiene integrando la función densidad dada sobre la superficie. El cálculo es el siguiente: | + | La masa de la superficie se obtiene integrando la función densidad dada sobre la superficie. |
| + | <br/> | ||
| + | El cálculo es el siguiente: | ||
<math>M=∬SfdS</math> | <math>M=∬SfdS</math> | ||
donde <math>S</math> es la superficie parametrizada. | donde <math>S</math> es la superficie parametrizada. | ||
La integral se puede expresar en coordenadas paramétricas <math>(u,v)</math> como: | La integral se puede expresar en coordenadas paramétricas <math>(u,v)</math> como: | ||
| − | <math>M=\int_a^b\int_c^d f(u,v)*\sqrt[]{((∂x | + | <center><math>M=\int_a^b\int_c^d f(u,v)*\sqrt[]{((\frac{∂x}{∂u})^2+(∂x∂v)^2+(\frac{∂x}{∂u})^2)}\; dv \; du</math></center> |
| − | + | '''Parametrización de la curva''': <math>γ(t)=(0,cosh(t),t)</math> | |
| − | + | <br/> | |
| − | El código para | + | Con: <math>t∈(-1,1)</math> |
| + | <br/> | ||
| + | <br/> | ||
| + | '''Densidad de la superficie''': <math>ρ(x,y,z)=z^2</math> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | '''Parametrización de la superficie''': | ||
| + | <br/> | ||
| + | <math>x=cosh(u)·cos(v)</math> | ||
| + | <br/> | ||
| + | <math>y=cosh(u)·sin(v)</math> | ||
| + | <br/> | ||
| + | <math>z=u</math> | ||
| + | <br/> | ||
| + | Con: <math>u ∈(-1,1), v ∈(0,2π)</math> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | '''Operaciones intermedias''': | ||
| + | <br/> | ||
| + | <math>r'u=sinh(u)·cos(v) \vec i + sinh(u)·sin(v) \vec j + \vec k</math> | ||
| + | <br/> | ||
| + | <math>r'v= -cosh(u)·sin(v) \vec i +cosh(u)·cos(v) \vec j</math> | ||
| + | <br/> | ||
| + | <math>r'u∧r'v=-cosh(u)·cos(v) \vec i -cosh(u)·sin(v) \vec j + sinh(u)·cosh(u) \vec k</math> | ||
| + | <br/> | ||
| + | <math>|r'u∧r'v|=cosh^2(u)</math> | ||
| + | <br/> | ||
| + | <math>f(\vec r(u,v))=u^2</math> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | '''Integrando''': | ||
| + | <br/> | ||
| + | <center><math>M=\int_0^{2\pi}\int_{-1}^1 u^2·cosh^2(u)·du·dv=2π·1,17238=7,36</math></center> | ||
| + | <br/> | ||
| + | El código para calcular la masa de la superficie es el siguiente: | ||
{{matlab|codigo= | {{matlab|codigo= | ||
| − | % | + | % Número de puntos |
| − | + | N1=100; N2=100; | |
| − | + | % Extremos de los intervalos | |
| − | + | a=-1; b=1; c=0; d=2.*pi; | |
| − | % | + | h1=(b-a)/N1; h2=(d-c)/N2; |
| − | + | % Coordenadas de la particición | |
| − | + | u=a:h1:b; v=c:h2:d; | |
| − | + | % Coordenadas del rectángulo | |
| − | % | + | [uu,vv]=meshgrid(u,v); |
| − | + | % Funcion | |
| − | + | f=uu.^2.*cosh(uu).^2; | |
| − | + | w1=ones(N1+1,1); | |
| − | + | w1(1)=1/2; w1(N1+1)=1/2; | |
| + | w2=ones(N2+1,1); | ||
| + | w2(1)=1/2; w2(N2+1)=1/2; | ||
| + | result=h1*h2*w2'*f*w1 | ||
}} | }} | ||
| − | La masa de la superficie | + | La masa de la superficie sería 7,3698 |
| + | <br/> | ||
| + | |||
| + | == Referencias == | ||
| + | <br/>'''Bibliografía''' | ||
| + | * Carlos Ivorra, La Catenaria, Universidad de Valencia ([https://www.uv.es/~ivorra/Libros/Catenaria.pdf La catenaria]) | ||
| + | * Departamento de Matemáticas ETSICCP, La Catenaria en Arquitectura, Universidad Politécnica de Madrid ([https://www2.caminos.upm.es/Departamentos/matematicas/Fdistancia/PIE/Chip%20geométrico/Catenaria.pdf La catenaria en arquitectura]) | ||
| + | * Carlos Castro, Notas breves sobre curvas planas y superficies regladas, Universidad Politécnica de Madrid | ||
| + | |||
| + | <br/>'''Enlaces externos''' | ||
| + | * [https://es.wikipedia.org/wiki/Catenaria La catenaria] | ||
| + | * [http://www.sc.ehu.es/sbweb/fisica/solido/din_rotacion/catenaria/catenaria.htm La curva catenaria] | ||
| + | * [https://web.archive.org/web/20060413093644/http://www-groups.dcs.st-and.ac.uk/~history/Curves/Curves.html Índice de curvas ] | ||
| + | [[Categoría:Teoría de Campos]] | ||
| + | [[Categoría:TC23/24]] | ||
Revisión actual del 15:31 17 dic 2023
| Trabajo realizado por estudiantes | |
|---|---|
| Título | La Catenaria. Grupo 12 |
| Asignatura | Teoría de Campos |
| Curso | 2023-24 |
| Autores | Alejandro Jiménez García Marta García-Moris Fontcuberta Alejandro Seises López Alberto Nuñez Cobo Álvaro Matías Acedo |
| Este artículo ha sido escrito por estudiantes como parte de su evaluación en la asignatura | |
En matemáticas y arquitectura se emplea la palabra catenaria para designar la curva cuyo trazado sigue la forma que adquiere una cadena o cuerda de densidad uniforme y perfectamente flexible sujeta por sus dos extremos y que se encuentra sometida únicamente a las fuerzas de la gravedad. En sentido estricto no se trata de una curva, sino una familia de curvas en la que cada una de ellas viene determinada por las coordenadas de sus extremos (x0,y0),(x1,y1) y por su longitud.
Ha desempeñado un papel esencial en la ingeniería civil a lo largo de la historia, utilizándose como herramienta resistente y segura en diversas estructuras, siendo los puentes colgantes y los cables de alta tensión dos de los ejemplos más famosos. La catenaria permite distribuir de manera uniforme las fuerzas y cargas, contribuyendo a la resistencia y estabilidad estructural. Su aplicación en cables de alta tensión facilita la creación de sistemas de transmisión eficientes, capaces de cubrir extensas distancias con mínimas deformaciones. Al ir colocando vectores fuerza en la catenaria, las curvas que se obtienen se denominan curvas funiculares, de forma que si se voltea una catenaria (se invierte su geometría) queda un arco que hereda las buenas propiedades de la curva inicial, además, como carece de tensiones laterales, se minimizan los esfuerzos de compresión sobre el arco, lo que permite obtener arcos de gran altura con mínimos empujes laterales.

Contenido
- 1 Representación de la curva
- 2 Vectores velocidad y aceleración
- 3 Longitud de la curva
- 4 Vector tangente y vector normal
- 5 Curvatura y gráfica
- 6 Circunferencia osculatriz
- 7 Fenómeno descrito por la curva
- 8 Empleo de la curva en Ingeniería Civil
- 9 Superficie de revolución alrededor del eje vertical
- 10 Distribución de la densidad a lo largo de la superficie
- 11 Referencias
1 Representación de la curva
Se tiene la siguiente curva plana parametrizada en coordenadas cartesianas que representa una catenaria:
Donde: [math]γ:t\to\mathbb{R}^2[/math]
Para dibujarla hacemos uso del software de programación y cálculo numérico Matlab/Octave.

% Definición de los parámetros
a=-1; b=1;h=0.01;
t=a:h:b;
% Definición de la curva
x=t;
y=cosh(t);
plot(x,y,"Color","b");
% Centrado de la gráfica en el origen de coordenadas
ax = gca;
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
% Etiquetas
title('Curva Catenaria')
axis("equal")
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
box on
grid minor
2 Vectores velocidad y aceleración
Siendo [math] γ(t) [/math] el vector posición:
El vector velocidad [math] γ´(t) [/math] es la derivada con respecto al tiempo del vector posición.
El vector aceleración [math] γ´´(t) [/math] es la derivada segunda de la posición con respecto al tiempo (derivada de la velocidad con respecto al tiempo).
Los vectores velocidad y aceleración se representan gráficamente usando el siguiente código:

% Definición de los parámetros
a=-1;
b=1;
h=0.1;
t=a:h:b;
% Definición de la curva
x=t;
y=cosh(t);
% Definición de la velocidad
v1=t./t;
v2=sinh(t);
% Definición de la aceleración
a1=0.*t;
a2=cosh(t);
hold on
plot(x,y,'LineWidth',2);
quiver(x,y,v1,v2);
quiver(x,y,a1,a2, "Color","g");
hold off
% Centrado de la gráfica en el origen de coordenadas
ax = gca;
ax.XAxisLocation = 'origin';
ax.YAxisLocation ='origin';
% Etiquetas
title('Vector velocidad y aceleración')
legend("Catenaria","Velocidad","Aceleración")
axis("equal")
xlim([-1 1])
ylim([0.8 2])
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
box on
grid minor
3 Longitud de la curva
La longitud de una curva se calcula mediante la siguiente fórmula:
La longitud de la curva se ha calculado a través del Método del Rectángulo usando el siguiente código:
function A = rectangulo(f, a, b, n)
f=@(t) sqrt(1+(sinh(t)).^2)
a=-1
b=1
n=200
A = 0;
h = (b-a)/n;
for k=1:n
xk = a + h*k; % Valor de x en el extremo del intervalo
A = A + f(xk)*h; % Sumamos el área del rectángulo
end
end
El programa nos da como resultado L = 2,35 m
4 Vector tangente y vector normal
4.1 Vector tangente
El vector velocidad representa los vectores tangentes a la trayectoria parametrizada por [math]\gamma(t)[/math], por tanto,
para obtener los vectores tangentes unitarios hay que dividir por el módulo.

x=t;
y=cosh(t);
% Vectores tangentes unitarios interiores
t1i=(t./t)./(sqrt(1+(sinh(t)).^2));
t2i=sinh(t)./(sqrt(1+(sinh(t)).^2));
% Vectores tangentes unitarios
hold on
plot(x,y,'LineWidth',2);
quiver(x,y,t1i,t2i);
hold off
% Centrado de la gráfica en el origen de coordenadas
ax = gca;
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
% Etiquetas
title('Vector tangente unitario')
legend("Catenaria","Vector tangente unitario")
axis("equal")
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
box on
grid minor
4.2 Vector normal
Los vectores normales obtienen girando un ángulo [math]\frac{\pi}{2}[/math] los vectores tangentes (son vectores ortogonales). De esa forma:
Vector [math]γ′(t)[/math] girado mediante matriz de rotación para [math]\theta =\frac{\pi}{2}[/math]:
Entonces:

% Definición de los parámetros
a=-1;
b=1;
h=0.09;
t=a:h:b;
% Definición de la curva
x=t;
y=cosh(t);
% Vectores normales unitarios orientación interior
n1i=sinh(t)./(sqrt(1+(sinh(t)).^2));
n2i=-(t./t)./(sqrt(1+(sinh(t)).^2));
% Vectores normales unitarios orientación exterior
n1e=-sinh(t)./(sqrt(1+(sinh(t)).^2));
n2e=(t./t)./(sqrt(1+(sinh(t)).^2));
hold on
plot(x,y,'LineWidth',2);
quiver(x,y,n1i,n2i);
quiver(x,y,n1e,n2e);
hold off
% Centrado de la gráfica en el origen de coordenadas
ax = gca;
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
% Etiquetas
title('Vectores normales')
legend("Catenaria","Vector normal interior","Vector normal exterior")
axis("equal")
ax.XAxisLocation = 'origin';
ax.YAxisLocation = 'origin';
box on
grid minor
5 Curvatura y gráfica
La curvatura [math]κ(t)[/math] indica que alrededor del punto [math]γ(t)[/math] la curva que mejor se aproxima a la catenaria, es la circunferencia de curvatura [math]κ(t)[/math],es decir, mide la desviación de ser recta en cada punto de la curva.
Se calcula de la siguiente manera:
n =70;
t = linspace ( -1 , 1 , n) ;
k = cosh(t)./((1+(sinh(t)).^2)).^(3/2) ;
figure
plot (t ,k ,'b') ;
axis equal
title ('Curvatura kappa (t). ') ;
xlabel('t');
ylabel('\kappa(t)');
grid on

6 Circunferencia osculatriz
La circunferencia osculatriz es una circunferencia que proporciona la mejor aproximación local a una curva en un punto específico. En el contexto de una catenaria [math]γ(t)[/math] en el plano, la circunferencia osculatriz en un punto \(P\) de la curva tiene su centro en:
La circunferencia osculatriz proporciona una buena aproximación a la curva en las proximidades del punto \(P\).
En este caso, en el punto \(P=γ(0)\) , \(t=0\)

% Definimos el radio y el centro de la circunferencia
t=0
K=cosh(t)/(1+sinh(t)^2)^(3/2)
radio=1/K
n=1/sqrt(1+sinh(t)^2)*[-sinh(t),1];
Q=[t,cosh(t)]+(1/K)*n
% Crear un conjunto de ángulos para generar puntos en la circunferencia
theta = linspace(0, 2*pi, 100);
% Calcular las coordenadas de los puntos en la circunferencia
x_circunferencia = Q(1) + radio * cos(theta);
y_circunferencia = Q(2) + radio * sin(theta);
% Parametrización de la catenaria
tt =-1:0.09:1;
x_catenaria = tt;
y_catenaria = cosh(tt);
% Dibujo de la circunferencia y la catenaria
figure;
plot(x_circunferencia, y_circunferencia, 'b-', 'LineWidth', 2);
hold on; % Mantener la gráfica actual y agregar nuevas
plot(x_catenaria, y_catenaria, 'r-', 'LineWidth', 2);
axis equal; % Hace que las unidades en x e y sean iguales
grid on;
title('Circunferencia y Catenaria');
xlabel('Eje X');
ylabel('Eje Y');
legend('Circunferencia', 'Catenaria');
hold off; % Liberar la gráfica actual para futuros trazados
7 Fenómeno descrito por la curva
7.1 Catenaria
Sea una cadena de bolitas metálicas, supondremos que hay N bolitas igualmente repartidas sobre un hilo de longitud L y de masa despreciable. Cada bolita estará, por tanto, sometida a tres fuerzas: su propio peso, la fuerza que ejerce el hilo a su izquierda y a su derecha.
 Relaciones importantes:
Relaciones importantes:
Para un punto de la catenaria, con un plano de comparación y siendo:
- [math] T_H: [/math] la tensión horizontal en el punto
- [math] a=\frac{T_H}{mg} : [/math] el parámetro de la catenaria(altura del punto más bajo con respecto al plano de comparación)
- [math] z: [/math] la altura del punto con relación al plano de comparación
- [math] x: [/math] la distancia horizontal al plano de comparación
La longitud de la curva [math](l)[/math] es:
Ecuación de la catenaria:
La tensión vertical es:
La tensión total del hilo es
7.2 Arco catenario
Se conoce como arco catenario al arco que reproduce exactamente la morfología de una curva catenaria invertida. Todas las características matemáticas de la catenaria se conservan cuando su gráfica se invierte.
Arco catenario
Distribución de cargas


El arco catenario es la forma ideal para el arco que se soporta a sí mismo. Cuando está construido de elementos individuales cuyas superficies son perpendiculares a la curva del arco, el empuje al apoyo se transmite a lo largo de la línea del arco (existe exclusivamente esfuerzo axil). Además, cuanto mayor es la altura, más pequeño es el empuje horizontal en los puntos de arranque, con lo que se pueden obtener grandes alturas con mínimos empujes laterales. Del arco catenario derivan los arcos funiculares (antifuniculares para geometría invertida) que tienen también óptimas características constructivas y que se pueden obtener con facilidad reproduciendo los efectos de cargas puntuales sobre una curva catenaria. Estos últimos son muy utilizados en ingeniería civil para salvar grandes vanos como alternativa a los puentes colgantes.

7.3 Diferencias con la parábola
Si observamos superpuestas las gráficas de una catenaria y una parábola podemos entender porqué los antiguos matemáticos en un principio suponían que era la parábola la curva que se combaba bajo su propio peso.
El desarrollo de las fórmulas matemáticas de una catenaria y una parábola coincide en sus tres primeros términos (y = a+ bx+ cx2) y solo a partir del cuarto ambas expresiones se diferencian (pudiendo existir en los últimos términos de la expresión de la catenaria x elevadas a potencias mayores). Esto hace que las gráficas de ambas curvas se parezcan para valores pequeños de la x, mostrando su diferencia según aumentan los valores de ésta.

La mayor diferencia entre las curvas corresponde a sus respectivas tangentes, en la catenaria el valor de la tangente tiende a la verticalidad mientras que en la parábola este valor tiene a una constante. Esto condiciona que en la catenaria, para valores infinitos de la y, la x tiende a valores limitados, mientras que en la parábola para los valores infinitos de la y se obtienen valores infinitos de la x. Ésta debería ser la característica que hiciese prevalecer a los arcos catenarios frente a los parabólicos, pero a pesar de la óptima calidad del arco catenario, así como de otras formas estáticamente estables, como la parábola invertida u otros arcos antifuniculares, durante mucho tiempo se consideró que tenían formas poco elegantes y no se utilizaron
8 Empleo de la curva en Ingeniería Civil
La catenaria en ingeniería civil es una curva muy común, al tratarse de una curva natural sometida a su propio peso. Este fenómeno de una cuerda o cable sometido a gravedad se da en los cables principales de los puentes colgantes, que es el cable de donde cuelgan las péndolas que se anclan al tablero. Un ejemplo de un puente de esta tipología puede ser el Golden Gate en San Francisco (Estados Unidos). Otro fenómeno en el que interviene esta curva es en las líneas eléctricas ferroviarias, que son los cables de donde se obtiene la energía eléctrica del tren. Estos cables cuelgan sometidos a su propio peso de unos elementos llamados catenarias dando lugar a la curva en cuestión. Es importante mencionar, que esta curva aparece también en los puentes de tipo arco con tablero superior (antifunicular), como puede ser el Puente de Gudián (Galicia).
El arquitecto español Antonio Gaudí usó ampliamente la catenaria en sus construcciones, este solía decir "La catenaria da elegancia y espiritualidad al arco, elegancia y espiritualidad a la construcción, evita contrafuertes, el edificio pesa menos, gana una gracia vaporosa y se aguanta sin raros accesorios ortopédicos". Hay arcos catenarios en la Casa Battló, en el Colegio de las Teresianas, en la Casa Milà o en la Sagrada Familia.

Golden Gate Bridge

Catenaria Madrid-Aranjuez

Puente de Gudián (Galicia)
Catenaria en la casa Milà de Antonio Gaudí




8.1 Obras Modernas
Gateway Arch
Probablemente la obra arquitectónica con forma de catenaria más famosa del siglo XX, se encuentra en Misuri, es el monumento nacional más alto de los Estados Unidos de América con una altura de 192 metros, distancia que es exactamente igual, pese a que la ilusión óptica sugiera lo contrario, a la separación existente entre los dos puntos de arranque a nivel del suelo.

Kingdom Centre
Otro espectacular ejemplo de catenaria, aunque en este caso el uso es más estético que estructural, lo podemos encontrar en Oriente medio, en concreto en Riad.

9 Superficie de revolución alrededor del eje vertical
Un catenoide es una superficie mínima que se genera mediante la rotación de una catenaria alrededor de su eje vertical, como curiosidad, esta fue la primera superficie mínima descubierta tras el plano.
Podemos ver la catenaria en mediante la siguiente parametrización en coordenadas cartesianas en [math] \mathbb{R}^3 [/math]:
Donde:
Para obtener la superficie de revolución hacemos uso del software de programación y cálculo numérico Matlab/Octave.
% Parámetros
u = linspace(-1, 1, 100);
v = linspace(0, 2*pi, 100);
[U, V] = meshgrid(u, v);
% Parametrización de la superficie en coordenadas cilíndricas
X = cosh(U) .* cos(V);
Y = cosh(U) .* sin(V);
Z = U;
% Dibujar la superficie de revolución
figure;
surf(X, Y, Z, 'EdgeColor', 'none');
title('Superficie de Revolución de la Catenaria alrededor del eje Z');
xlabel('x');
ylabel('y');
zlabel('z');
axis equal;
grid on;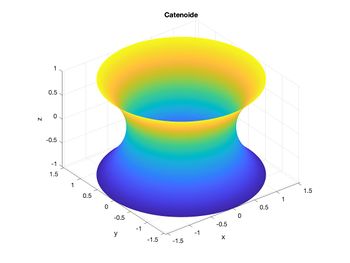
Superficie
Catenoide


10 Distribución de la densidad a lo largo de la superficie
La densidad de la superficie es [math]f(x,y,z)=z^2(x,y,z)=z^2[/math]. Para obtener cómo se distribuye la densidad en la superficie, se puede considerar la variación de [math]f[/math] en la parametrización de la superficie.
En este caso, la parametrización queda [math]x(u,v)=(cosh(u)cos(v),cosh(u)sin(v),u)[/math].
Siendo la densidad [math]f[/math] a lo largo de la superficie:
De lo que se deduce que la densidad aumenta cuadráticamente con respecto a [math]u[/math], la coordenada a lo largo del eje [math]z[/math], es decir, a mayor distancia del eje [math]z[/math], mayor es la densidad. Una vez conocida la distribución de la densidad en la superficie, se puede calcular la masa de la superficie.
10.1 Cálculo de la masa de la superficie conociendo la densidad en la superficie
La masa de la superficie se obtiene integrando la función densidad dada sobre la superficie.
El cálculo es el siguiente:
[math]M=∬SfdS[/math]
donde [math]S[/math] es la superficie parametrizada.
La integral se puede expresar en coordenadas paramétricas [math](u,v)[/math] como:
Parametrización de la curva: [math]γ(t)=(0,cosh(t),t)[/math]
Con: [math]t∈(-1,1)[/math]
Densidad de la superficie: [math]ρ(x,y,z)=z^2[/math]
Parametrización de la superficie:
[math]x=cosh(u)·cos(v)[/math]
[math]y=cosh(u)·sin(v)[/math]
[math]z=u[/math]
Con: [math]u ∈(-1,1), v ∈(0,2π)[/math]
Operaciones intermedias:
[math]r'u=sinh(u)·cos(v) \vec i + sinh(u)·sin(v) \vec j + \vec k[/math]
[math]r'v= -cosh(u)·sin(v) \vec i +cosh(u)·cos(v) \vec j[/math]
[math]r'u∧r'v=-cosh(u)·cos(v) \vec i -cosh(u)·sin(v) \vec j + sinh(u)·cosh(u) \vec k[/math]
[math]|r'u∧r'v|=cosh^2(u)[/math]
[math]f(\vec r(u,v))=u^2[/math]
Integrando:
El código para calcular la masa de la superficie es el siguiente:
% Número de puntos
N1=100; N2=100;
% Extremos de los intervalos
a=-1; b=1; c=0; d=2.*pi;
h1=(b-a)/N1; h2=(d-c)/N2;
% Coordenadas de la particición
u=a:h1:b; v=c:h2:d;
% Coordenadas del rectángulo
[uu,vv]=meshgrid(u,v);
% Funcion
f=uu.^2.*cosh(uu).^2;
w1=ones(N1+1,1);
w1(1)=1/2; w1(N1+1)=1/2;
w2=ones(N2+1,1);
w2(1)=1/2; w2(N2+1)=1/2;
result=h1*h2*w2'*f*w1
La masa de la superficie sería 7,3698
11 Referencias
Bibliografía
- Carlos Ivorra, La Catenaria, Universidad de Valencia (La catenaria)
- Departamento de Matemáticas ETSICCP, La Catenaria en Arquitectura, Universidad Politécnica de Madrid (La catenaria en arquitectura)
- Carlos Castro, Notas breves sobre curvas planas y superficies regladas, Universidad Politécnica de Madrid
Enlaces externos