Diferencia entre revisiones de «Usuario discusión:Marta cuevas»
(Sección nueva: →Coordenadas cilíndricas parabólicas (Grupo27)) |
(→Coordenadas cilíndricas parabólicas (Grupo27)) |
||
| Línea 4: | Línea 4: | ||
Nuevamente, bienvenido y diviértete! [[Usuario:Carlos Castro|Carlos Castro]] ([[Usuario discusión:Carlos Castro|discusión]]) 10:13 28 nov 2025 (CET) | Nuevamente, bienvenido y diviértete! [[Usuario:Carlos Castro|Carlos Castro]] ([[Usuario discusión:Carlos Castro|discusión]]) 10:13 28 nov 2025 (CET) | ||
| − | == | + | ===Introduccion=== |
| + | En este trabajo estudiaremos y aplicaremos las coordenadas cilíndricas parabólicas. Estas se denotan por \((u, v, z)\) y su relación con las coordenadas cartesianas \((x_1, x_2, x_3)\) es: | ||
| + | |||
| + | <center><math>\begin{cases}x_1 = \left(\frac{u^2 - v^2}{2}\right)\\ | ||
| + | x_2 = uv \\ | ||
| + | x_3 = z | ||
| + | \end{cases} | ||
| + | </math> | ||
| + | </center> | ||
| + | |||
| + | |||
| + | Como las coordenadas cilíndricas pueden verse como la extensión de las coordenadas polares en \(R^2\) a \(R^3\), definiendo la variable \(z\) como la altura cartesiana \(x_3\), de manera análoga, las coordenadas cilíndricas parabólicas generalizan un cambio de coordenadas en \(R^2\) a \(R^3\) respecto de las coordenadas parabólicas de \(R^2\). | ||
| + | |||
| + | Sirven principalmente para simplificar ecuaciones y problemas cuya geometría natural está asociada a parábolas rotadas alrededor de un eje. Al elegir un sistema que coincide con la forma del problema, las ecuaciones (especialmente las diferenciales) se vuelven más fáciles de resolver. | ||
| + | |||
| + | == Parametrizaciones de las líneas coordenadas \(\gamma_u\), \(\gamma_v\), \(\gamma_z\) en cartesianas == | ||
| + | |||
| + | ===Linea coordenada \(\gamma_u\) === | ||
| + | |||
| + | Manteniendo \(v\) y \(z\) constantes, y variando \(u\): | ||
| + | |||
| + | <math> | ||
| + | \gamma_u(t): \begin{cases} | ||
| + | x_1 = \left( \frac{t^2 - v^2}{2}\right) \\ | ||
| + | x_2 = tv \\ | ||
| + | x_3 = z | ||
| + | \end{cases} | ||
| + | </math> | ||
| + | |||
| + | ===Linea coordenada \(\gamma_v\) === | ||
| + | |||
| + | Manteniendo \(u\) y \(z\) constantes, y variando \(v\): | ||
| + | |||
| + | <math> | ||
| + | \gamma_v(t): \begin{cases} | ||
| + | x_1 = \left( \frac{u^2 - t^2}{2}\right) \\ | ||
| + | x_2 = ut \\ | ||
| + | x_3 = z | ||
| + | \end{cases} | ||
| + | </math> | ||
| + | |||
| + | ===Linea coordenada \(\gamma_z\) === | ||
| + | |||
| + | Manteniendo \(u\) y \(v\) constantes, y variando \(z\): | ||
| + | |||
| + | <math> | ||
| + | \gamma_z(t): \begin{cases} | ||
| + | x_1 = \left( \frac{u^2 - v^2}{2}\right) \\ | ||
| + | x_2 = uv \\ | ||
| + | x_3 = t | ||
| + | \end{cases} | ||
| + | </math> | ||
| + | |||
| + | ===Gráficas y códigos MATLAB === | ||
| + | |||
| + | Las curvas coordenadas asociadas a \(x_1\) y \(x_2\) tienen forma de parábolas parametrizadas por \(u\) y \(v\). | ||
| + | |||
| + | <gallery> | ||
| + | Campos1.jpg|Descripción1 | ||
| + | Campos2.jpg|Descripción2 | ||
| + | </gallery> | ||
| + | |||
| + | [[Archivo:Campos2|700px|marco|centro|Curvas coordenadas ]] | ||
| + | |||
| + | [[Archivo:Campos1|700px|marco|centro|Curvas coordenadas ]] | ||
| + | |||
| + | |||
| + | {{matlab|codigo= | ||
| + | %Líneas coordenadas de u y v en 2D | ||
| + | clear;clc | ||
| + | |||
| + | figure; | ||
| + | hold on; | ||
| + | |||
| + | %Vectores interés | ||
| + | u=linspace(0.5, 5, 100); % Valores de u | ||
| + | v=linspace(0.5, 5, 100); % Valores de v | ||
| + | |||
| + | %Curva γ_u: fijando v, (queda libre u) | ||
| + | v_fixed = 1; | ||
| + | x1_u = (u.^2 - v_fixed^2) / 2; | ||
| + | x2_u = u .* v_fixed; | ||
| + | plot(x1_u, x2_u, 'r', 'LineWidth', 1.5); | ||
| + | |||
| + | %Curva γ_v: fijando u (queda libre v) | ||
| + | u_fixed = 1; | ||
| + | x1_v = (u_fixed^2 - v.^2) / 2; | ||
| + | x2_v = (u_fixed) .* v; | ||
| + | plot(x1_v, x2_v, 'b', 'LineWidth', 1.5); | ||
| + | |||
| + | %EditGráfico | ||
| + | title('Líneas coordenadas'); | ||
| + | xlabel('Eje x_1'); | ||
| + | ylabel('Eje x_2'); | ||
| + | legend({'línea γ_u', 'líneas γ_v'}); | ||
| + | grid on; | ||
| + | axis equal; | ||
| + | hold off; | ||
| + | }} | ||
== Introduccion == | == Introduccion == | ||
Revisión del 13:26 3 dic 2025
Bienvenido a MateWiki! Esperamos que contribuyas mucho y bien. Probablemente desearás leer las páginas de ayuda. Nuevamente, bienvenido y diviértete! Carlos Castro (discusión) 10:13 28 nov 2025 (CET)
Contenido
1 Introduccion
En este trabajo estudiaremos y aplicaremos las coordenadas cilíndricas parabólicas. Estas se denotan por \((u, v, z)\) y su relación con las coordenadas cartesianas \((x_1, x_2, x_3)\) es:
Como las coordenadas cilíndricas pueden verse como la extensión de las coordenadas polares en \(R^2\) a \(R^3\), definiendo la variable \(z\) como la altura cartesiana \(x_3\), de manera análoga, las coordenadas cilíndricas parabólicas generalizan un cambio de coordenadas en \(R^2\) a \(R^3\) respecto de las coordenadas parabólicas de \(R^2\).
Sirven principalmente para simplificar ecuaciones y problemas cuya geometría natural está asociada a parábolas rotadas alrededor de un eje. Al elegir un sistema que coincide con la forma del problema, las ecuaciones (especialmente las diferenciales) se vuelven más fáciles de resolver.
2 Parametrizaciones de las líneas coordenadas \(\gamma_u\), \(\gamma_v\), \(\gamma_z\) en cartesianas
2.1 Linea coordenada \(\gamma_u\)
Manteniendo \(v\) y \(z\) constantes, y variando \(u\):
[math] \gamma_u(t): \begin{cases} x_1 = \left( \frac{t^2 - v^2}{2}\right) \\ x_2 = tv \\ x_3 = z \end{cases} [/math]
2.2 Linea coordenada \(\gamma_v\)
Manteniendo \(u\) y \(z\) constantes, y variando \(v\):
[math] \gamma_v(t): \begin{cases} x_1 = \left( \frac{u^2 - t^2}{2}\right) \\ x_2 = ut \\ x_3 = z \end{cases} [/math]
2.3 Linea coordenada \(\gamma_z\)
Manteniendo \(u\) y \(v\) constantes, y variando \(z\):
[math] \gamma_z(t): \begin{cases} x_1 = \left( \frac{u^2 - v^2}{2}\right) \\ x_2 = uv \\ x_3 = t \end{cases} [/math]
2.4 Gráficas y códigos MATLAB
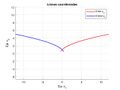
Las curvas coordenadas asociadas a \(x_1\) y \(x_2\) tienen forma de parábolas parametrizadas por \(u\) y \(v\).
Descripción1
Descripción2


%Líneas coordenadas de u y v en 2D
clear;clc
figure;
hold on;
%Vectores interés
u=linspace(0.5, 5, 100); % Valores de u
v=linspace(0.5, 5, 100); % Valores de v
%Curva γ_u: fijando v, (queda libre u)
v_fixed = 1;
x1_u = (u.^2 - v_fixed^2) / 2;
x2_u = u .* v_fixed;
plot(x1_u, x2_u, 'r', 'LineWidth', 1.5);
%Curva γ_v: fijando u (queda libre v)
u_fixed = 1;
x1_v = (u_fixed^2 - v.^2) / 2;
x2_v = (u_fixed) .* v;
plot(x1_v, x2_v, 'b', 'LineWidth', 1.5);
%EditGráfico
title('Líneas coordenadas');
xlabel('Eje x_1');
ylabel('Eje x_2');
legend({'línea γ_u', 'líneas γ_v'});
grid on;
axis equal;
hold off;
3 Introduccion
En este trabajo estudiaremos y aplicaremos las coordenadas cilíndricas parabólicas. Estas se denotan por \((u,v,z)\) y su relacion con las coordenadas cartesianas \((x_1, x_2, x_3)\) es:
Sirven principalmente para simplificar ecuaciones y problemas cuya geometría natural está asociada a parábolas rotadas alrededor de un eje. Al elegir un sistema que coincide con la forma del problema, las ecuaciones (especialmente las diferenciales) se vuelven más fáciles de resolver.