Diferencia entre revisiones de «La Clotoide. GRUPO 26»
(Se ha deshecho la revisión 62835 de Alba Sánchez (disc.)) |
(→Superficie reglada) |
||
| (No se muestran 68 ediciones intermedias de 2 usuarios) | |||
| Línea 1: | Línea 1: | ||
| + | {{ TrabajoED | La Clotoide. GRUPO 26 | [[:Categoría:Teoría de Campos|Teoría de Campos]]|[[:Categoría:TC23/24|2023-24]] | Cristina Martín de Hijas, <br/>Iñigo Guitart Simal, <br/>Alba Sánchez Alberquilla }} | ||
| + | |||
| + | [[Categoría:TC23/24]] | ||
| + | |||
==Introducción.== | ==Introducción.== | ||
Expresado de un modo matemático, las clotoides son curvas tangentes en el origen al eje de abscisas con un radio de curvatura que disminuye de manera inversamente proporcional a la distancia recorrida sobre ella. | Expresado de un modo matemático, las clotoides son curvas tangentes en el origen al eje de abscisas con un radio de curvatura que disminuye de manera inversamente proporcional a la distancia recorrida sobre ella. | ||
| + | <br/> | ||
| + | Para el estudio de sus propiedades, nos centraremos en analizar los vectores velocidad y aceleración, así como el tangente y normal para su posterior enfoque a la ingeniería civil. | ||
| + | <br/> | ||
| + | En los últimos apartados, se estudiará una hélice circular, como su superficie reglada, para su mismo análisis en la ingeniería. | ||
==Dibujo de la curva.== | ==Dibujo de la curva.== | ||
| Línea 13: | Línea 21: | ||
La representación gráfica de la curva se obtiene mediante el siguiente código: | La representación gráfica de la curva se obtiene mediante el siguiente código: | ||
<br> | <br> | ||
| − | [[Archivo: | + | [[Archivo:clotoidefinal.jpg|505px|thumb|right|Figura 1: Clotoide]] |
{{matlab|codigo= | {{matlab|codigo= | ||
% Definición parámetros | % Definición parámetros | ||
| Línea 56: | Línea 64: | ||
A la hora de la representación, partimos del código y gráfica del primer apartado, añadiendo el siguiente código y obteniendo: | A la hora de la representación, partimos del código y gráfica del primer apartado, añadiendo el siguiente código y obteniendo: | ||
<br> | <br> | ||
| − | [[Archivo: | + | [[Archivo:veloacelfinal.jpg|350px|thumb|right|Figura 2: Vectores velocidad y aceleración junto a la clotoide]] |
{{matlab|codigo= | {{matlab|codigo= | ||
% Vectores velocidad y aceleración | % Vectores velocidad y aceleración | ||
| Línea 79: | Línea 87: | ||
==Longitud de la curva.== | ==Longitud de la curva.== | ||
| + | <br> | ||
| + | La longitud de una curva se calcula mediante la siguiente fórmula: | ||
| + | <br> | ||
| + | <center><math> ℓ(γ) = \int_{0}^{t}|γ′(t)|dt </math></center> | ||
| + | <br> | ||
| + | En nuestro caso <math>\vec{{\gamma }'}</math> calculado en el apartado previo es: | ||
| + | <math> | ||
| + | \vec{{\gamma }'}= cos(\frac{t^2}{2}) \vec{i} +sin(\frac{t^2}{2})\vec{j} | ||
| + | </math> | ||
| + | <br> | ||
| + | Su módulo por tanto es: | ||
| + | <center><math> | ||
| + | |γ′(t)| = \sqrt {cos(\frac{t^2}{2})+sin(\frac{t^2}{2})} = \sqrt {1} = 1 | ||
| + | </math></center> | ||
| + | <br> | ||
| + | De lo que deducimos que la longitud de la curva es: | ||
| + | <br> | ||
| + | <center><math> | ||
| + | ℓ(γ) = \int_{0}^{4}\sqrt {cos(\frac{t^2}{2})+sin(\frac{t^2}{2})}dt = \int_{0}^{4}1dt = 4-0 = 4 | ||
| + | </math></center> | ||
| + | <br> | ||
==Vectores tangente y normal.== | ==Vectores tangente y normal.== | ||
| − | + | Para calcular los vectores tangente y normal aplicamos teóricamente las siguientes definiciones | |
| + | <center> | ||
| + | <math>\bar{t}(t)=\frac{\gamma {}'(t)}{\left | \gamma {}'(t) \right |}=\frac{cos(\frac{t^2}{2})\bar{i}+sin(\frac{t^2}{2})\bar{j}}{1} | ||
| + | </math></center> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | <center> | ||
| + | <math>\bar{n}(t)=\frac{-y{}'(t)\bar{i}+\bar{x}{}'(t)\bar{j}}{\left | \gamma {}'(t) \right |}=-sin(\frac{t^2}{2})\bar{i}+cos(\frac{t^2}{2})\bar{j}</math> | ||
| + | </center><br/> | ||
| + | A la hora de la representación, partimos del código y gráfica del primer apartado, añadiendo el siguiente código y obteniendo: | ||
| + | [[Archivo:ap4final.jpg|420px|thumb|right|Figura 3: Vectores tangente y normal de la clotoide]] | ||
| + | {{matlab|codigo= | ||
| + | % Vectores tangente y normal | ||
| + | tanx= cos(t.^2/2); | ||
| + | tany= sin(t.^2/2); | ||
| + | nx=-sin(t.^2/2); | ||
| + | ny=cos(t.^2/2); | ||
| + | % Gráfica junto a la clotoide | ||
| + | figure; | ||
| + | plot(x,y); | ||
| + | hold on | ||
| + | quiver(x,y,tanx,tany) | ||
| + | quiver(x,y,nx,ny) | ||
| + | hold off | ||
| + | axis equal; | ||
| + | title('Vectores tangente y normal'); | ||
| + | xlabel('Eje x'); | ||
| + | ylabel('Eje y'); | ||
| + | shg | ||
| + | }} | ||
==Curvatura.== | ==Curvatura.== | ||
| + | La fórmula de la función curvatura para cualquier | ||
| + | parametrización <math>\gamma(t)</math> es | ||
| + | <center> | ||
| + | <math>\bar{\kappa }(t)=\frac{\bar{x}'(t)\bar{y}''(t)-\bar{x}''(t)\bar{y}'(t)}{\left ( \bar{x}'(t)^2+\bar{y}'(t)^2 \right )^\frac{3}{2}}</math></center> | ||
| + | Con nuestros datos obtenemos: | ||
| + | <center> | ||
| + | <math> | ||
| + | \bar{\kappa }(t)=\frac{t}{\sqrt{1^3}}=t</math></center><br/> | ||
| + | Para representarla utilizamos este sencillo programa que muestra cómo aumenta linealmente la curvatura de 0 a 4 segundos. | ||
| + | [[Archivo:ap5perf.jpg|380px|thumb|right|Figura 4: Curvatura de la clotoide]] | ||
| + | {{matlab|codigo= | ||
| + | % Definicón de parámetro t | ||
| + | t=linspace(0,4,50); | ||
| + | % Definicón de la función | ||
| + | k=t; | ||
| + | % Dibujo | ||
| + | figure; | ||
| + | plot(k,t); | ||
| + | ylabel('curvatura'); | ||
| + | xlabel('tiempo'); | ||
| + | title('Curvatura') | ||
| + | shg | ||
| + | }} | ||
| + | |||
| + | |||
==Circunferencia osculatriz.== | ==Circunferencia osculatriz.== | ||
| + | La circuferencia osculatriz a una curva en un punto dado, es una circunferencia que representa la curvatura de dicha curva en ese punto. A su vez, esta circunferencia es tangente a la curva por la regla de Leibniz.<br/> | ||
| + | Enfocando esta definición a lo pedido en este apartado, sea <math>P=\gamma (1)</math> , es decir <math>t=1s</math>, hallar el centro y el radio de la circunferencia osculatriz en <math>P</math> y dibujar la circunferencia junto a la curva.<br/> | ||
| + | Su radio <math>R(t)</math> es igual a | ||
| + | <center> | ||
| + | <math>R(t)=\frac{1}{\left | \kappa (t) \right |}</math> | ||
| + | </center> | ||
| + | Su centro <math>Q(t)</math> viene dado por la fórmula <center><math>Q(t)=\gamma (t)+\frac{1}{\kappa (t)}\bar{n}(t)</math></center> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | Haciendo los cálculos quedan los siguientes resultados | ||
| + | <center><math>R(1)=1</math> </center><br/><br/> | ||
| + | <center><math>Q(1) = \left\{\begin{matrix} | ||
| + | Q_x(1)=\int_{0}^{1}cos(\frac{t^2}{s})ds - sin(\frac{1}{2})\\\\ | ||
| + | |||
| + | |||
| + | Q_y(1)=\int_{0}^{1}sin(\frac{t^2}{2})ds+cos(\frac{1}{2}) | ||
| + | |||
| + | \end{matrix}\right.</math></center> | ||
| + | Llegados a este punto necesitamos la ayuda del siguiente programa de Matlab para resolver las integrales por el método del trapecio. Como necesitamos conocer en qué punto de la clotoide se encuentra el instante <math>t=1s</math>, primero definimos la curva de 0 a 1 segundos para encontrar dicho punto. A la hora de la representación también tenemos en cuenta el código y gráfica del primer apartado. | ||
| + | <br/> | ||
| + | [[Archivo:grafica6buena.jpg|505px|thumb|right|Figura 6: Circunferencia osculatriz en el instante t=1s junto a la clotoide]] | ||
| + | {{matlab|codigo= | ||
| + | % Curva de 0 a 1 segundos | ||
| + | t0=0; | ||
| + | tN=1; | ||
| + | N=100; | ||
| + | h=(tN-t0)/N; | ||
| + | t=linspace(t0,tN,N); | ||
| + | x=zeros(1,length(t)); | ||
| + | y=zeros(1,length(t)); | ||
| + | fx=inline('cos(s.^2/2)'); | ||
| + | fy=inline('sin(s.^2/2)'); | ||
| + | for N=1:length(x) | ||
| + | s=t(1:N); | ||
| + | x(N)=trapz(s,fx(s)); | ||
| + | y(N)=trapz(s,fy(s)); | ||
| + | end | ||
| + | % Punto de la clotoide para t=1 | ||
| + | P=[x(100),y(100)]; | ||
| + | % Vector normal calculado antes | ||
| + | n=[-sin(1/2),cos(1/2)]; | ||
| + | % Aplicación de la fórmula para t=1 | ||
| + | k=1; | ||
| + | R=1; | ||
| + | % Fórmula centro | ||
| + | Q=P+R*n; | ||
| + | % Conversión a polares | ||
| + | tt=linspace(0,2*pi,40); | ||
| + | % Añadimos Q(1) porque es la coordenada de las x de las abcisas del centro | ||
| + | xx=R*cos(tt)+Q(1); | ||
| + | % Q(2) es la coordenada en las ordenadas | ||
| + | yy=R*sin(tt)+Q(2); | ||
| + | % Gráfica osculatriz junto a la clotoide | ||
| + | figure; | ||
| + | hold on | ||
| + | plot(X,Y); | ||
| + | plot(P(1), P(2)); | ||
| + | plot(xx,yy); | ||
| + | axis equal; | ||
| + | xlabel('Eje x'); | ||
| + | ylabel('Eje y'); | ||
| + | title('Circunferencia osculatriz y clotoide'); | ||
| + | hold off | ||
| + | shg | ||
| + | }} | ||
| + | |||
==Propiedades para la ingeniería.== | ==Propiedades para la ingeniería.== | ||
| − | + | En el ámbito de la ingeniería civil, en particular en el diseño de carreteras y ferrocarriles, las curvas de transición se usan para proporcionar giros suaves entre las secciones rectas y curvas, mejorando la seguridad y comodidad para conductores y pasajeros, así como minimizar el estrés en la infraestructura como rieles o pavimento y por supuesto en los propios vehículos. | |
| − | + | ||
| − | + | ||
| − | + | ||
<br> | <br> | ||
<br> | <br> | ||
Estas curvas ayudan a reducir las fuerzas laterales que experimentan los vehículos y trenes cuando cambian de dirección, lo que facilita su implementación, cálculo, y optimiza los costos de construcción y mantenimiento, al reducir la necesidad de realizar cambios bruscos en la dirección de una vía. Esto combinado con el peralte propicia un escenario muy favorable para evitar accidentes de descarrilamiento. | Estas curvas ayudan a reducir las fuerzas laterales que experimentan los vehículos y trenes cuando cambian de dirección, lo que facilita su implementación, cálculo, y optimiza los costos de construcción y mantenimiento, al reducir la necesidad de realizar cambios bruscos en la dirección de una vía. Esto combinado con el peralte propicia un escenario muy favorable para evitar accidentes de descarrilamiento. | ||
| + | <br/> | ||
| + | <br/> | ||
| + | Otro uso muy común de la clotoide es en la construcción de montañas rusas. Antiguamente se hacían de forma circular erróneamente por lo que se ha modificado su trayectoria para así evitar daños a los usuarios debido a la aceleración o fuerzas <math>g</math> resultantes. | ||
| + | |||
==Ejemplos en la ingeniería civil.== | ==Ejemplos en la ingeniería civil.== | ||
<br/> | <br/> | ||
| − | + | <gallery class="center" heights="500px" widths="500px"> | |
| − | + | File:Pregunta10.2campos.jpg|'''Puente de Øresund, entre Dinamarca y Suecia''' | |
| − | + | File:Pregunta10.3campos.jpg|'''Túnel de Laerdal, Noruega''' | |
| − | + | File:Pregunta10.1campos.jpg|'''Carretera de Iroha-zaka, Japón''' | |
| − | < | + | File:Canaldesuez112.jpg|'''Canal de Suez, Egipto''' |
| + | </gallery> | ||
==Superficie reglada== | ==Superficie reglada== | ||
Consideramos la hélice en <math>R^3</math>, que se puede parametrizar en coordenadas cartesianas como | Consideramos la hélice en <math>R^3</math>, que se puede parametrizar en coordenadas cartesianas como | ||
<br/> | <br/> | ||
| + | <center> | ||
<math> | <math> | ||
γ(t)=(x_{1}(t),x_{2}(t),x_{3}(t))=(cost,sint,t),t∈(0,4π) | γ(t)=(x_{1}(t),x_{2}(t),x_{3}(t))=(cost,sint,t),t∈(0,4π) | ||
</math> | </math> | ||
| + | </center> | ||
<br/> | <br/> | ||
Definimos la superficie reglada asociada a <math>\gamma</math> mediante segmentos de longitud <math>d</math> con vector director <math>\overline{w}(t)</math> como aquella parametrizada por | Definimos la superficie reglada asociada a <math>\gamma</math> mediante segmentos de longitud <math>d</math> con vector director <math>\overline{w}(t)</math> como aquella parametrizada por | ||
<center> | <center> | ||
| + | (1) | ||
<math>\phi (u,v)=\gamma (v)+u\cdot \overline{w}(v) </math> | <math>\phi (u,v)=\gamma (v)+u\cdot \overline{w}(v) </math> | ||
<br/> | <br/> | ||
| Línea 133: | Línea 287: | ||
<br/> | <br/> | ||
<br/> | <br/> | ||
| + | <center> | ||
\begin{pmatrix}v_1\\v_2 \\v_3 \end{pmatrix}= | \begin{pmatrix}v_1\\v_2 \\v_3 \end{pmatrix}= | ||
\begin{pmatrix}cost & -sent &0 \\ sent & cost & 0\\ 0 & 0 & 1\end{pmatrix} | \begin{pmatrix}cost & -sent &0 \\ sent & cost & 0\\ 0 & 0 & 1\end{pmatrix} | ||
\begin{pmatrix}1\\0\\0\end{pmatrix}= | \begin{pmatrix}1\\0\\0\end{pmatrix}= | ||
\begin{pmatrix}cost\\ sent\\0 \end{pmatrix} | \begin{pmatrix}cost\\ sent\\0 \end{pmatrix} | ||
| + | </center> | ||
<br/> | <br/> | ||
<br/> | <br/> | ||
| Línea 145: | Línea 301: | ||
</center> | </center> | ||
<br/> | <br/> | ||
| − | Si aplicamos la | + | Si aplicamos la definición (1) la parametrización de la hélice queda |
<center> | <center> | ||
<math>\phi (u,v)=(cosv+u\cdot cosv)\overline{i}+(senv+u\cdot senv)\overline{j}+v\overline{k},</math> <math> v∈(0,4π), u∈(0,1)</math> | <math>\phi (u,v)=(cosv+u\cdot cosv)\overline{i}+(senv+u\cdot senv)\overline{j}+v\overline{k},</math> <math> v∈(0,4π), u∈(0,1)</math> | ||
| Línea 152: | Línea 308: | ||
<br/> | <br/> | ||
Para representarla hemos utilizado el siguiente programa en Matlab | Para representarla hemos utilizado el siguiente programa en Matlab | ||
| − | [[Archivo: | + | [[Archivo:superficiereg.jpg|400px|thumb|dcha|Figura 11: Superficie Reglada]] |
{{matlab|codigo= | {{matlab|codigo= | ||
%Definición de parámetros | %Definición de parámetros | ||
| Línea 169: | Línea 325: | ||
shg | shg | ||
}} | }} | ||
| + | |||
===Aplicaciones en la Ingeniería civil.=== | ===Aplicaciones en la Ingeniería civil.=== | ||
| + | <br/> | ||
| + | <gallery class="center" heights="500px" widths="500px"> | ||
| + | File:Bernabeuhelic.jpg|'''Rampa petaonal, estadio Santiago Bernabeu''' | ||
| + | File:parkingcris.jpg|'''Rampa parking''' | ||
| + | File:escaleracaracol.jpg|'''Escalera de caracol''' | ||
| + | File:pilotehel.png|'''Pilotes helicoidales''' | ||
| + | </gallery> | ||
==Masa de la superficie reglada.== | ==Masa de la superficie reglada.== | ||
| Línea 178: | Línea 342: | ||
Para calcular la masa utilizamos la expresión | Para calcular la masa utilizamos la expresión | ||
<center> | <center> | ||
| − | <math>Masa=\iint_{S}^{}fds=\iint_{D}^{}f(\bar{r(u,v)})\cdot \left | \bar{r'_u}\times\bar{r'_v} \right |dudv</math> | + | (2)<math>Masa=\iint_{S}^{}fds=\iint_{D}^{}f(\bar{r(u,v)})\cdot \left | \bar{r'_u}\times\bar{r'_v} \right |dudv</math> |
</center> | </center> | ||
| + | |||
| + | <br/> | ||
| + | <br/> | ||
Como hemos hallado en el apartado anterior | Como hemos hallado en el apartado anterior | ||
<center> | <center> | ||
| Línea 213: | Línea 380: | ||
\end{vmatrix}=senv\bar{i}-cosv\bar{j}+(1+u)\bar{k}</math> | \end{vmatrix}=senv\bar{i}-cosv\bar{j}+(1+u)\bar{k}</math> | ||
</center> | </center> | ||
| + | <br/> | ||
| + | <br/> | ||
El módulo del producto vectorial es igual a <center> | El módulo del producto vectorial es igual a <center> | ||
<math>\left | \bar{r}'_u \times \bar{r}'_v\right |=\sqrt{sen^{2}v+cos^{^{2}}v+(1+u)^{^{2}}}=\sqrt{1+(1+u^{2})}</math></center> | <math>\left | \bar{r}'_u \times \bar{r}'_v\right |=\sqrt{sen^{2}v+cos^{^{2}}v+(1+u)^{^{2}}}=\sqrt{1+(1+u^{2})}</math></center> | ||
| Línea 219: | Línea 388: | ||
<center> | <center> | ||
<math>f(\vec{r}(u,v))=10-(cosv+u\cdot cosv)^{2}-(sinv+u\cdot sinv)^{2}=-u^{2}-2u+9</math></center> | <math>f(\vec{r}(u,v))=10-(cosv+u\cdot cosv)^{2}-(sinv+u\cdot sinv)^{2}=-u^{2}-2u+9</math></center> | ||
| + | <br/> | ||
| + | <br/> | ||
| + | La definición (2) resuelta mediante Matlab con el código posterior quedaría: | ||
| + | <br/> | ||
| + | <center> | ||
| + | <math> | ||
| + | MASA=\int_{0}^{4\pi}\int_{0}^{1}(-u^{2}-2u+9)(\sqrt{1+(1+u)^2}) dudv= 145,84 | ||
| + | </math> | ||
| + | </center> | ||
| + | <br/> | ||
| + | {{matlab|codigo= | ||
| + | % Número de puntos | ||
| + | n1=100; n2=100; | ||
| + | % Extremos de los intervalos | ||
| + | h1=(1-0)/n1; h2=(4*pi-0)/n2; | ||
| + | u=0:h1:1; v=0:h2:4*pi; | ||
| + | % Mallado | ||
| + | [uu,vv]=meshgrid(u,v); | ||
| + | % Cálculos | ||
| + | f=(-uu.^2-2.*uu+9).*(sqrt(1+(1+uu.^2))); | ||
| + | w1=ones(n1+1,1); | ||
| + | w1(1)=1/2; w1(n1+1)=1/2; | ||
| + | w2=ones(n2+1,1); | ||
| + | w2(1)=1/2; w2(n2+1)=1/2; | ||
| + | result=h1*h2*w2'*f*w1 | ||
| + | }} | ||
Revisión actual del 11:26 4 dic 2024
| Trabajo realizado por estudiantes | |
|---|---|
| Título | La Clotoide. GRUPO 26 |
| Asignatura | Teoría de Campos |
| Curso | 2023-24 |
| Autores | Cristina Martín de Hijas, Iñigo Guitart Simal, Alba Sánchez Alberquilla |
| Este artículo ha sido escrito por estudiantes como parte de su evaluación en la asignatura | |
Contenido
1 Introducción.
Expresado de un modo matemático, las clotoides son curvas tangentes en el origen al eje de abscisas con un radio de curvatura que disminuye de manera inversamente proporcional a la distancia recorrida sobre ella.
Para el estudio de sus propiedades, nos centraremos en analizar los vectores velocidad y aceleración, así como el tangente y normal para su posterior enfoque a la ingeniería civil.
En los últimos apartados, se estudiará una hélice circular, como su superficie reglada, para su mismo análisis en la ingeniería.
2 Dibujo de la curva.
Dada una función
[math] \gamma (t)=(x(t),y(t))=\left ( \int_{0}^{t}cos(\frac{s^2}{2})ds, \int_{0}^{t}sin(\frac{s^2}{2})ds \right ), t\in (0,4) [/math]
La representación gráfica de la curva se obtiene mediante el siguiente código:

% Definición parámetros
N=200;
h=(4-0)/N;
t=linspace(0,4,N);
% Almacenamiento resultados
x=zeros(1,length(t));
y=zeros(1,length(t));
% Funciones
fx=inline('cos(s.^2/2)');
fy=inline('sin(s.^2/2)');
% Integración método trapecio
for N=1:length(x)
s=t(1:N);
x(N)=trapz(s,fx(s));
y(N)=trapz(s,fy(s));
end
% Gráfica
figure;
plot(x,y);
axis equal
xlabel('eje x');
ylabel('eje y');
title('Dibujo clotoide');
shg
3 Velocidad y aceleración.
Para los cálculos, hacemos uso de las definiciones de velocidad [math] \dot{\gamma } [/math] y aceleración [math] \ddot{\gamma } [/math]
[math]
\vec{{\gamma }'}= cos(\frac{t^2}{2}) \vec{i} +sin(\frac{t^2}{2})\vec{j}
[/math]
[math]
\vec{{\gamma }''}= -t\cdot sin(\frac{t^2}{2}) \vec{i} +t\cdot cos(\frac{t^2}{2})\vec{j}
[/math]
A la hora de la representación, partimos del código y gráfica del primer apartado, añadiendo el siguiente código y obteniendo:

% Vectores velocidad y aceleración
Vx = cos(t.^2/2);
Vy = sin(t.^2/2);
Ax = -t.*sin(t.^2/2);
Ay = t.*cos(t.^2/2);
% Gráfica
figure
hold on
plot(x,y)
quiver(x,y,Vx,Vy);
quiver(x,y,Ax,Ay);
xlabel('eje x');
ylabel('eje y');
title('VELOCIDAD Y ACELERACIÓN');
axis equal;
hold off
shg
4 Longitud de la curva.
La longitud de una curva se calcula mediante la siguiente fórmula:
En nuestro caso [math]\vec{{\gamma }'}[/math] calculado en el apartado previo es:
[math]
\vec{{\gamma }'}= cos(\frac{t^2}{2}) \vec{i} +sin(\frac{t^2}{2})\vec{j}
[/math]
Su módulo por tanto es:
De lo que deducimos que la longitud de la curva es:
5 Vectores tangente y normal.
Para calcular los vectores tangente y normal aplicamos teóricamente las siguientes definiciones
[math]\bar{n}(t)=\frac{-y{}'(t)\bar{i}+\bar{x}{}'(t)\bar{j}}{\left | \gamma {}'(t) \right |}=-sin(\frac{t^2}{2})\bar{i}+cos(\frac{t^2}{2})\bar{j}[/math]
A la hora de la representación, partimos del código y gráfica del primer apartado, añadiendo el siguiente código y obteniendo:

% Vectores tangente y normal
tanx= cos(t.^2/2);
tany= sin(t.^2/2);
nx=-sin(t.^2/2);
ny=cos(t.^2/2);
% Gráfica junto a la clotoide
figure;
plot(x,y);
hold on
quiver(x,y,tanx,tany)
quiver(x,y,nx,ny)
hold off
axis equal;
title('Vectores tangente y normal');
xlabel('Eje x');
ylabel('Eje y');
shg6 Curvatura.
La fórmula de la función curvatura para cualquier parametrización [math]\gamma(t)[/math] es
Con nuestros datos obtenemos:
Para representarla utilizamos este sencillo programa que muestra cómo aumenta linealmente la curvatura de 0 a 4 segundos.

% Definicón de parámetro t
t=linspace(0,4,50);
% Definicón de la función
k=t;
% Dibujo
figure;
plot(k,t);
ylabel('curvatura');
xlabel('tiempo');
title('Curvatura')
shg
7 Circunferencia osculatriz.
La circuferencia osculatriz a una curva en un punto dado, es una circunferencia que representa la curvatura de dicha curva en ese punto. A su vez, esta circunferencia es tangente a la curva por la regla de Leibniz.
Enfocando esta definición a lo pedido en este apartado, sea [math]P=\gamma (1)[/math] , es decir [math]t=1s[/math], hallar el centro y el radio de la circunferencia osculatriz en [math]P[/math] y dibujar la circunferencia junto a la curva.
Su radio [math]R(t)[/math] es igual a
[math]R(t)=\frac{1}{\left | \kappa (t) \right |}[/math]
Haciendo los cálculos quedan los siguientes resultados
Llegados a este punto necesitamos la ayuda del siguiente programa de Matlab para resolver las integrales por el método del trapecio. Como necesitamos conocer en qué punto de la clotoide se encuentra el instante [math]t=1s[/math], primero definimos la curva de 0 a 1 segundos para encontrar dicho punto. A la hora de la representación también tenemos en cuenta el código y gráfica del primer apartado.

% Curva de 0 a 1 segundos
t0=0;
tN=1;
N=100;
h=(tN-t0)/N;
t=linspace(t0,tN,N);
x=zeros(1,length(t));
y=zeros(1,length(t));
fx=inline('cos(s.^2/2)');
fy=inline('sin(s.^2/2)');
for N=1:length(x)
s=t(1:N);
x(N)=trapz(s,fx(s));
y(N)=trapz(s,fy(s));
end
% Punto de la clotoide para t=1
P=[x(100),y(100)];
% Vector normal calculado antes
n=[-sin(1/2),cos(1/2)];
% Aplicación de la fórmula para t=1
k=1;
R=1;
% Fórmula centro
Q=P+R*n;
% Conversión a polares
tt=linspace(0,2*pi,40);
% Añadimos Q(1) porque es la coordenada de las x de las abcisas del centro
xx=R*cos(tt)+Q(1);
% Q(2) es la coordenada en las ordenadas
yy=R*sin(tt)+Q(2);
% Gráfica osculatriz junto a la clotoide
figure;
hold on
plot(X,Y);
plot(P(1), P(2));
plot(xx,yy);
axis equal;
xlabel('Eje x');
ylabel('Eje y');
title('Circunferencia osculatriz y clotoide');
hold off
shg
8 Propiedades para la ingeniería.
En el ámbito de la ingeniería civil, en particular en el diseño de carreteras y ferrocarriles, las curvas de transición se usan para proporcionar giros suaves entre las secciones rectas y curvas, mejorando la seguridad y comodidad para conductores y pasajeros, así como minimizar el estrés en la infraestructura como rieles o pavimento y por supuesto en los propios vehículos.
Estas curvas ayudan a reducir las fuerzas laterales que experimentan los vehículos y trenes cuando cambian de dirección, lo que facilita su implementación, cálculo, y optimiza los costos de construcción y mantenimiento, al reducir la necesidad de realizar cambios bruscos en la dirección de una vía. Esto combinado con el peralte propicia un escenario muy favorable para evitar accidentes de descarrilamiento.
Otro uso muy común de la clotoide es en la construcción de montañas rusas. Antiguamente se hacían de forma circular erróneamente por lo que se ha modificado su trayectoria para así evitar daños a los usuarios debido a la aceleración o fuerzas [math]g[/math] resultantes.
9 Ejemplos en la ingeniería civil.

Puente de Øresund, entre Dinamarca y Suecia
Túnel de Laerdal, Noruega

Carretera de Iroha-zaka, Japón

Canal de Suez, Egipto




10 Superficie reglada
Consideramos la hélice en [math]R^3[/math], que se puede parametrizar en coordenadas cartesianas como
[math] γ(t)=(x_{1}(t),x_{2}(t),x_{3}(t))=(cost,sint,t),t∈(0,4π) [/math]
Definimos la superficie reglada asociada a [math]\gamma[/math] mediante segmentos de longitud [math]d[/math] con vector director [math]\overline{w}(t)[/math] como aquella parametrizada por
(1)
[math]\phi (u,v)=\gamma (v)+u\cdot \overline{w}(v) [/math]
[math]v\in (a,b)[/math]
[math]u\in (c,d)[/math]
10.1 Representación.
Se pide dibujar la superficie reglada asociada a dicha curva mediante segmentos ortogonales de longitud [math] 1[/math] y vector director [math]\vec{e_{\rho}} [/math].
Parametrizando la curva según [math]v[/math], queda la siguiente función
[math] γ(v)=(x_{1}(v),x_{2}(v),x_{3}(v))=(cosv,senv,v),v∈(0,4π) [/math]
A partir de la cual se conoce el vector posición [math]\vec{r}(v)=cosv\vec{i}+ senv\vec{j}+v\vec{k},v∈(0,4π)[/math].
Se utiliza la siguiente Matriz de Cambio de Base para pasar el vector director [math]\vec{e_{\rho}} [/math] de coordenadas cilíndricas a cartesianas.
\begin{pmatrix}v_1\\v_2 \\v_3 \end{pmatrix}= \begin{pmatrix}cost & -sent &0 \\ sent & cost & 0\\ 0 & 0 & 1\end{pmatrix} \begin{pmatrix}1\\0\\0\end{pmatrix}= \begin{pmatrix}cost\\ sent\\0 \end{pmatrix}
El vector [math]\vec{e_{\rho}} [/math] en coordenadas cartesianas es igual a
[math]\overline{w}(v)=cosv\overline{i}+senv\overline{j}[/math]
Si aplicamos la definición (1) la parametrización de la hélice queda
[math]\phi (u,v)=(cosv+u\cdot cosv)\overline{i}+(senv+u\cdot senv)\overline{j}+v\overline{k},[/math] [math] v∈(0,4π), u∈(0,1)[/math]
Para representarla hemos utilizado el siguiente programa en Matlab

%Definición de parámetros
v=(0:0.01:4.*pi);
u=(0:0.01:1);
%Matrices de superficie
[MU,MV]=meshgrid(u,v);
%Función de la superficie reglada
x=cos(MV)+MU.*cos(MV);
y=sin(MV)+MU.*sin(MV);
z=MV;
%Dibujo superficie
surf(x,y,z);
title('Superficie reglada');
shading flat;
shg
10.2 Aplicaciones en la Ingeniería civil.
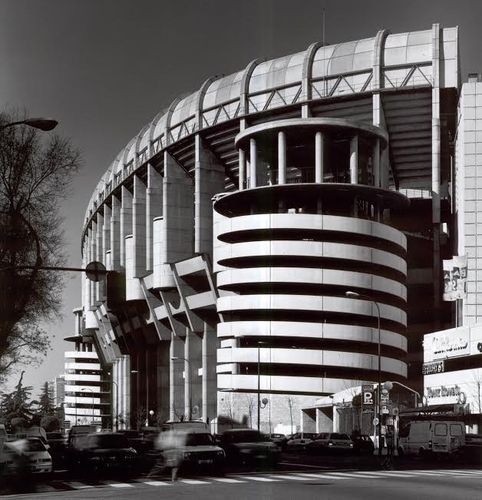
Rampa petaonal, estadio Santiago Bernabeu

Rampa parking

Escalera de caracol

Pilotes helicoidales




11 Masa de la superficie reglada.
Supongamos que la densidad de la superficie del apartado anterior viene dada por la función
[math]f(x_1,x_2,x_3)=10-x_1^2-x_2^2[/math]
Para calcular la masa utilizamos la expresión
(2)[math]Masa=\iint_{S}^{}fds=\iint_{D}^{}f(\bar{r(u,v)})\cdot \left | \bar{r'_u}\times\bar{r'_v} \right |dudv[/math]
Como hemos hallado en el apartado anterior
[math]
\phi (u,v)\begin{cases}
x=cosv+u\cdot cosv \\
y=senv+u\cdot senv\\
z=v
\end{cases}[/math]
[math]
\vec{{r}}(u,v)=(cosv+u\cdot cosv)\vec{i}+(sinv+u\cdot sinv)\vec{j}+v\vec{k}[/math]
[math]
\vec{{r}}_u=cosv \vec{i}+sinv\vec{j}
[/math]
[math]\vec{{r}}_v=-(sinv+u\cdot sinv) \vec{i}+(cosv+u\cdot cosv)\vec{j}+\vec{k}[/math]
[math] \bar{r}'_u\times \bar{r}'_v=\begin{vmatrix} i & j & k\\ cosv &senv &0 \\ -(senv+u\cdot senv)&cosv+u\cdot cosv & 1 \end{vmatrix}=senv\bar{i}-cosv\bar{j}+(1+u)\bar{k}[/math]
La función evaluada según el vector [math]\vec{{r}}(u,v)[/math] nos da
La definición (2) resuelta mediante Matlab con el código posterior quedaría:
[math] MASA=\int_{0}^{4\pi}\int_{0}^{1}(-u^{2}-2u+9)(\sqrt{1+(1+u)^2}) dudv= 145,84 [/math]
% Número de puntos
n1=100; n2=100;
% Extremos de los intervalos
h1=(1-0)/n1; h2=(4*pi-0)/n2;
u=0:h1:1; v=0:h2:4*pi;
% Mallado
[uu,vv]=meshgrid(u,v);
% Cálculos
f=(-uu.^2-2.*uu+9).*(sqrt(1+(1+uu.^2)));
w1=ones(n1+1,1);
w1(1)=1/2; w1(n1+1)=1/2;
w2=ones(n2+1,1);
w2(1)=1/2; w2(n2+1)=1/2;
result=h1*h2*w2'*f*w1