Diferencia entre revisiones de «La Catenaria (grupo 57)»
(→Distribución de la densidad y cálculo de la masa) |
(→Función de densidad del catenoide) |
||
| Línea 190: | Línea 190: | ||
<center> | <center> | ||
<math> | <math> | ||
| − | R(t)= | + | R(t)=3\cosh\left(\frac{t}{3}\right) |
</math> | </math> | ||
</center> | </center> | ||
| Línea 198: | Línea 198: | ||
<center> | <center> | ||
<math> | <math> | ||
| − | x_1(t,\theta)= | + | x_1(t,\theta)=3\cosh\left(\frac{t}{3}\right)\cos\theta;\quad |
| − | x_2(t,\theta)= | + | x_2(t,\theta)=3\cosh\left(\frac{t}{3}\right)\sin\theta;\quad |
x_3(t,\theta)=t | x_3(t,\theta)=t | ||
</math> | </math> | ||
| Línea 210: | Línea 210: | ||
\boldsymbol{\gamma}(t,\theta)= | \boldsymbol{\gamma}(t,\theta)= | ||
\big( | \big( | ||
| − | + | 3\cosh(\tfrac{t}{3})\cos\theta,\; | |
| − | + | 3\cosh(\tfrac{t}{3})\sin\theta,\; | |
t | t | ||
\big) | \big) | ||
| Línea 226: | Línea 226: | ||
<math> | <math> | ||
\frac{\partial \boldsymbol{\gamma}}{\partial t}= | \frac{\partial \boldsymbol{\gamma}}{\partial t}= | ||
| − | (\sinh(\tfrac{t}{ | + | (\sinh(\tfrac{t}{3})\cos\theta,\;\sinh(\tfrac{t}{3})\sin\theta,\;1),\quad |
\frac{\partial \boldsymbol{\gamma}}{\partial \theta}= | \frac{\partial \boldsymbol{\gamma}}{\partial \theta}= | ||
| − | (- | + | (-3\cosh(\tfrac{t}{3})\sin\theta,\;3\cosh(\tfrac{t}{3})\cos\theta,\;0) |
</math> | </math> | ||
</center> | </center> | ||
| Línea 237: | Línea 237: | ||
<math> | <math> | ||
\frac{\partial \boldsymbol{\gamma}}{\partial t}\times\frac{\partial \boldsymbol{\gamma}}{\partial \theta}= | \frac{\partial \boldsymbol{\gamma}}{\partial t}\times\frac{\partial \boldsymbol{\gamma}}{\partial \theta}= | ||
| − | (- | + | (-3\cosh(\tfrac{t}{3})\cos\theta,\;-3\cosh(\tfrac{t}{3})\sin\theta,\;3\cosh(\tfrac{t}{3})\sinh(\tfrac{t}{3})),\quad |
| − | dS= | + | dS=3\cosh^2\left(\frac{t}{3}\right) dt\,d\theta |
</math> | </math> | ||
</center> | </center> | ||
Revisión del 20:46 6 dic 2025
| Trabajo realizado por estudiantes | |
|---|---|
| Título | La catenaria. Grupo 57 |
| Asignatura | Teoría de Campos |
| Curso | 2025-26 |
| Autores |
|
| Este artículo ha sido escrito por estudiantes como parte de su evaluación en la asignatura | |
La catenaria es una curva ideal que representa la curva característica que adopta un cable, cuerda o cadena perfectamente flexible cuando se encuentra suspendida entre dos puntos fijos y sometida a un campo gravitatorio uniforme. Esta forma se debe al equilibrio del peso propio y la ausencia de rigidez flexional.
Cumple la ecuación:
[math] y = a \cosh\left(\frac{x}{a}\right) [/math], siendo a un numero natural mayor que 0
Para representarla se utilizará su parametrización en cartesianas y a = 3:
Contenido
- 1 Dibujo de la curva
- 2 Vectores velocidad γ'(t) y aceleración γ' '(t)
- 3 Longitud de la curva
- 4 Vectores tangente [math]\vec{t}(t)[/math] y normal [math]\vec{n}(t)[/math]
- 5 Curvatura[math]\quad\kappa(t)[/math]
- 6 Circunferencia osculatriz
- 7 Propiedades de la curva
- 8 Ejemplos de la curva en construcciones civiles
- 9 Catenaria y parábola
- 10 Catenoide
- 11 Función de densidad del catenoide
1 Dibujo de la curva
Utilizando MATLAB para la representación de la curva, se obtiene:

t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva;
plot(x,y);
axis equal;
grid minor;
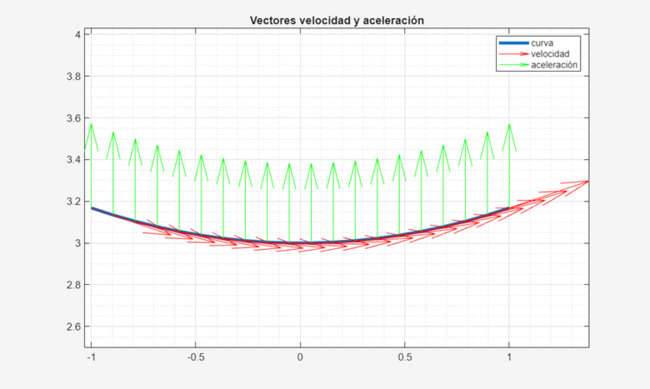
2 Vectores velocidad γ'(t) y aceleración γ' '(t)
El vector velocidad representa el vector tangente a la curva en cada uno de los puntos de la misma, este informa sobre la dirección y sentido de la curva, además su modulo no constante indica la velocidad escalar en cada punto de la misma, viene dado por la expresión:
El vector aceleración representa la variación de dirección y magnitud que experimenta el vector velocidad al variar el parámetro t. Se puede observar como la dirección y sentido del mismo se mantiene constante a lo largo de la curva. En este caso se expresa como:
2.1 Representación en MATLAB
% parametrizamos la curva;
t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva;
plot(x,y,'LineWidth',3);
axis equal;
grid minor;
hold on;
% creamos el vector velocidad con sus componentes;
vi=ones(1,20);
vj=s;
% representamos el vector velocidad;
quiver(x,y,vi,vj,'r');
hold on;
% creamos el vector aceleración con sus componentes;
ai=zeros(1,20);
aj=c./3;
% representamos el vector aceleración;
quiver(x,y,ai,aj,'g');
3 Longitud de la curva
La longitud de una curva parametrizada en función de un parámetro t en un intervalo [math] t\in ({t_1},{t_2})[/math] viene dada por:
[math] L=\int_{t_1}^{t_2}|γ′(t)|=[/math], siendo [math] |γ'(t)|[/math] el módulo del vector velocidad.
Para calcularlo se necesita el vector velocidad: [math] \gamma'(t)=(x'(t),y'(t))=(1,\sinh(\frac{t}{3})) [/math] , del que obtenemos su módulo: [math] \left|\overline{\gamma}'(t) \right|=\sqrt{1 + \sinh^2\left(\frac{t}{3}\right)}[/math] = [math]\sqrt{\cosh^2\left(\frac{t}{3}\right)}[/math].
Sustituyendo y operando en [math] t\in (-1,1)[/math] se obtiene:
[math] L=\int_{-1}^{1}\sqrt{cosh^2(\frac{t}{3})}dt= \int_{-1}^{1}\cosh(\frac{t}{3})dt = 3(sinh(\frac{1}{3})-sinh(\frac{-1}{3}))= 6sinh(\frac{1}{3}) = 2,03724 [/math]
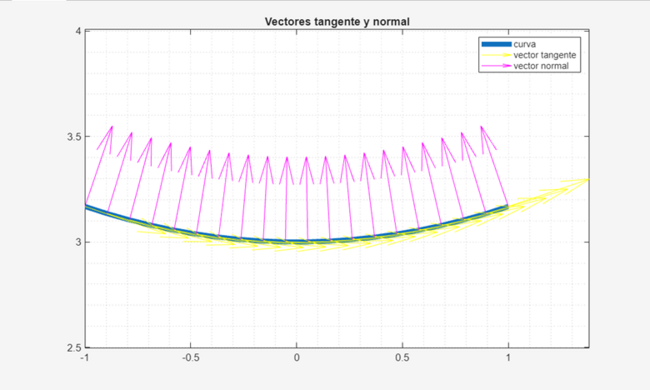
4 Vectores tangente [math]\vec{t}(t)[/math] y normal [math]\vec{n}(t)[/math]
El vector tangente [math]\vec{t}(t)[/math], unitario, indica la dirección en que avanza la curva en cada punto, se calcula como: [math]\vec{t}(t)=\frac{γ'(t)}{|γ'(t)|} [/math]
En este caso queda: [math] \vec{t}(t)=\frac{\vec{i}+sinh(\frac{t}{3})\vec{j}}{cosh(\frac{t}{3})}=sech(\frac{t}{3})\vec{i}+tanh(\frac{t}{3})\vec{j} [/math]
Por otro lado, el vector normal [math]\vec{n}(t)[/math], también unitario, apunta hacia el centro de la circunferencia que mejor se adapta a la curva, y se calcula como: [math] \vec{n}(t)=\vec{b}(t)\times\vec{t}(t) [/math], siendo [math]\vec{b}(t)[/math] el vector binormal de la curva. Como se trata de una curva plana perteneciente al plano XY, se toma [math]\vec{b}(t)=\vec{k}[/math].
Por tanto [math] \vec{n}(t)=\vec{b}(t)\times\vec{t}(t)= \begin{equation} \begin{vmatrix} \vec{i} & \vec{j} & \vec{k}\\ 0 & 0 & 1\\ sech(\frac{t}{3}) & tanh(\frac{t}{3}) & 0 \end{vmatrix}\end{equation}=-tanh(\frac{t}{3})\vec{i}+sech(\frac{t}{3})\vec{j} [/math]
4.1 Representación en MATLAB
% parametrizamos la curva
t=linspace(-1,1,20);
s=sinh(t/3);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva
plot(x,y,'LineWidth',5)
axis equal
grid minor
hold on
% creamos el vector tangente unitario con sus componentes
tgi=1./c;
tgj=s./c;
% representamos el vector tangente unitario
quiver(x,y,tgi,tgj,'y')
hold on
% creamos el vector normal unitario exterior con sus componentes
ni=(-s)./c;
nj=1./c;
% representamos el vector normal exterior
quiver(x,y,ni,nj,'m')
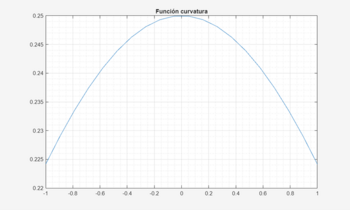
5 Curvatura[math]\quad\kappa(t)[/math]
La curvatura indica qué tanto cambia de dirección una curva en un punto específico, esta se define como:[math]\quad\kappa(t)=\frac{|\gamma'(t)\times \gamma''(t)|}{|\gamma'(t)|^{3}}[/math]
Por tanto, conociendo los vectores [math] γ'(t) [/math] y [math] γ''(t) [/math] obtenidos anteriormente, se calcula:
[math] κ(t)=\frac{\frac{1}{3}*cosh(\frac{t}{3})-0*senh(\frac{t}{3})}{(1+senh^2(\frac{t}{3}))^\frac{3}{2}}=\frac{cosh(\frac{t}{3})}{3(1+senh^2(\frac{t}{3}))^\frac{3}{2}}=\frac{1}{3cosh^2(\frac{t}{3})} [/math] , que indica la curvatura de la curva en función del parámetro t.
5.1 Representación en MATLAB
La representación en una gráfica de la curva: [math] κ(t)= \frac{1}{3cosh^2(\frac{t}{3})} [/math] , en el intervalo [math]\quad t\in (-1,1)[/math].
% parametrizamos t
t=linspace(-1,1,20);
c=cosh(t/3);
x=t;
% definimos la función curvatura
k=1./(2.*c).^2;
% dibujamos la función curvatura
plot(t,k)
grid minor
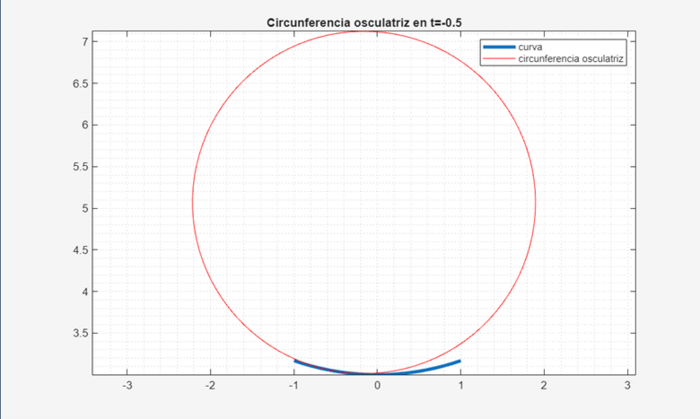
6 Circunferencia osculatriz
La circunferencia osculatriz de una curva en un punto dado, es la circunferencia que mejor se aproxima localmente a la curva, teniendo la misma dirección tangente y curvatura que la curva en ese punto específico.
El radio de la circunferencia osculatriz en un cierto punto de la curva [math]t_0[/math] se define como: [math]R(t_0)=\frac{1}{\kappa(t_0)}[/math]
En este caso se calculará el radio de la circunferencia en el punto de la curva correspondiente a [math]\gamma(t_0=-0.5)[/math]:
[math]R(-0,5)=\frac{1}{\kappa(-0,5)} =\frac{1}{\frac{1}{3 \cosh^{2}\left(-\frac{0.5}{3}\right)}} =\frac{3\sqrt[3]{e^{2}}+6e+3e\sqrt[3]{e}}{4e} = 3,0841[/math]
Por otro lado, el centro de dicha circunferencia se define como: [math]\quad Q(t_0)=\gamma(t_0)+\frac{1}{\kappa(t_0)}\,\vec{n}(t_0)[/math]
Conociendo la curvatura [math]\kappa[/math] y el vector normal [math]\vec{n}[/math] , se calcula el centro de la circunferencia que pasa por el punto de la curva correspondiente a [math]\gamma(t_0=-0.5)[/math]:
[math]Q(-0,5)=(-0,5;\; 3\cosh{\frac{-0,5}{3}}) +\frac{1}{\kappa(-0,5)}\left(-tanh\left(\frac{-0.5}{3}\right), sech\left(\frac{-0.5}{3}\right)\right)
=\left(-\frac12-\frac{3\sqrt[3]{e^{2}}-3e\sqrt[3]{e}}{4e}, \; \frac{3\sqrt[6]{e^{5}}+3e\sqrt[6]{e}}{e}\right) = (0,00931;\; 6,0835)[/math]
6.1 Representación en MATLAB
% parametrizamos t
t=linspace(-1,1,20);
c=cosh(t/3);
x=t;
y=3*c;
% dibujamos la curva
plot(x,y,'LineWidth',3)
axis equal
grid minor
hold on
s=sinh(-0.5/3);
c=cosh(-0.5/3);
% definimos la función curvatura en el punto (t=-0.5)
k=1/(2*(c^2));
% calculamos el radio de la circunferencia osculatriz en el punto (t=-0.5)
R=1/abs(k);
% definimos el vector normal en el punto
ni=-s/c;
nj=1/c;
% calculamos el centro
Ci=-0.5+R*ni;
Cj=3*c+R*nj;
% parametrizamos la circunferencia en coordenadas polares
theta=linspace(0,2*pi,100);
x=Ci+R.*cos(theta);
y=Cj+R.*sin(theta);
plot(x,y,'r')
7 Propiedades de la curva
La curva catenaria es la geometría que asume una cadena o un cable idealizado, flexible e inextensible, cuando se encuentra suspendido en sus extremos y es sometido únicamente a la acción de la gravedad.
Su propiedad fundamental es que su configuración de equilibrio minimiza la energía potencial del cable, lo que la hace muy estable y resistente, y la convierte en una forma ideal para el soporte de cargas distribuidas uniformemente.
Debido a esto, en el campo de la ingeniería civil la curva catenaria posee una gran relevancia e interés. El diseño de estructuras como los puentes colgantes, líneas eléctricas o catenarias ferroviarias aprovechan la estabilidad y resistencia proporcionada por esta forma natural. Además, una aplicación destacada es el uso de la catenaria invertida para el diseño de arcos, ya que estos trabajan de manera óptima solo a compresión, logrando evitar esfuerzos flectores y cortantes, son conocidos como arcos funiculares.
8 Ejemplos de la curva en construcciones civiles
Como se ha dicho, la curva catenaria está presente en diversas construcciones civiles debido a sus propiedades de equilibrio frente a cargas distribuidas provocadas por la acción de la gravedad. A continuación se exponen algunos ejemplos:

Puente de Manhattan (Nueva York)

Gateway Arch (San Luis, Misuri)

Golden Gate Bridge (San Francisco, California)

Catenaria ferroviaria

Puente Mike O'Callaghan–Pat Tillman (EE.UU.)





9 Catenaria y parábola
9.1 Representación en MATLAB
10 Catenoide
10.1 Representación en MATLAB
10.2 Ejemplos de la superficie en construcciones civiles
11 Función de densidad del catenoide
La curva generatriz del catenoide viene dada por:
[math] R(t)=3\cosh\left(\frac{t}{3}\right) [/math]
Al girarla alrededor del eje [math]x_3[/math], se obtiene la parametrización:
[math] x_1(t,\theta)=3\cosh\left(\frac{t}{3}\right)\cos\theta;\quad x_2(t,\theta)=3\cosh\left(\frac{t}{3}\right)\sin\theta;\quad x_3(t,\theta)=t [/math]
En forma vectorial:
[math] \boldsymbol{\gamma}(t,\theta)= \big( 3\cosh(\tfrac{t}{3})\cos\theta,\; 3\cosh(\tfrac{t}{3})\sin\theta,\; t \big) [/math]
11.1 Distribución de la densidad y cálculo de la masa

Las derivadas parciales son:
[math] \frac{\partial \boldsymbol{\gamma}}{\partial t}= (\sinh(\tfrac{t}{3})\cos\theta,\;\sinh(\tfrac{t}{3})\sin\theta,\;1),\quad \frac{\partial \boldsymbol{\gamma}}{\partial \theta}= (-3\cosh(\tfrac{t}{3})\sin\theta,\;3\cosh(\tfrac{t}{3})\cos\theta,\;0) [/math]
El producto vectorial y su norma (elemento de área) son:
[math] \frac{\partial \boldsymbol{\gamma}}{\partial t}\times\frac{\partial \boldsymbol{\gamma}}{\partial \theta}= (-3\cosh(\tfrac{t}{3})\cos\theta,\;-3\cosh(\tfrac{t}{3})\sin\theta,\;3\cosh(\tfrac{t}{3})\sinh(\tfrac{t}{3})),\quad dS=3\cosh^2\left(\frac{t}{3}\right) dt\,d\theta [/math]
La densidad de la superficie es:
[math] f(x_1,x_2,x_3) = \frac{x_3^2}{1 + x_1^2 + x_2^2} \quad\longrightarrow\quad f(t,\theta) = \frac{t^2}{1 + 9 \cosh^2\left(\frac{t}{3}\right)} [/math]
%% Distribución de la densidad sobre un catenoide
% Parámetros
A = 3; % parámetro del catenoide
N = 200; % número de puntos en cada dirección
t = linspace(-1,1,N);
theta = linspace(0,2*pi,N);
% Generamos mallas 2D
[T, Theta] = meshgrid(t, theta);
% Parametrización del catenoide
X1 = A*cosh(T/A).*cos(Theta);
X2 = A*cosh(T/A).*sin(Theta);
X3 = T;
% Función de densidad f(x1,x2,x3) = x3^2 / (1 + x1^2 + x2^2)
F = X3.^2 ./ (1 + X1.^2 + X2.^2);
% Gráfico de la densidad
figure
surf(X1,X2,X3,F)
shading interp
colorbar
xlabel('x_1')
ylabel('x_2')
zlabel('x_3')
title('Distribución de la densidad sobre el catenoide')
view(45,30)
Por tanto, la integral de la masa queda:
[math] M=\int_{0}^{2\pi}\int_{-1}^{1} f(t,\theta) dS =6\pi \int_{-1}^{1} \frac{t^2 \cosh^2\left(\frac{t}{3}\right)}{1+9\cosh^2\left(\frac{t}{3}\right)} dt [/math]
11.2 Código MATLAB para calcular la masa
% Cálculo de la masa del catenoide por método de rectángulos
A = 3;
a = -1; b = 1;
N = 20000; % número de subintervalos
dt = (b-a)/N; % ancho de cada rectángulo
tmid = a + (0.5:1:N-0.5)*dt; % puntos medios
% Integrando
integrando = ( tmid.^2 .* cosh(tmid./A).^2 ) ./ ( 1 + A^2 .* cosh(tmid./A).^2 );
% Suma de áreas
I = sum(integrando)*dt;
% Masa total
M = 6*pi*I;
fprintf('La masa aproximada es M = %.5f\n', M);11.3 Resultado de la masa
Aplicando el código MATLAB, se obtiene la masa aproximada del catenoide:
[math] \mathbf{M} \approx 1.26465 [/math]
Esta masa corresponde a la integral de la densidad sobre la superficie:
[math] M = 6 \pi \int_{-1}^{1} \frac{t^2 \cosh^2\left(\frac{t}{3}\right)}{1 + 9 \cosh^2\left(\frac{t}{3}\right)} \, dt [/math]
donde se ha tomado [math]A = 3[/math] y los intervalos [math]t \in [-1,1][/math], [math]\theta \in [0,2\pi][/math].